Paso 9: Montaje de la electrónica
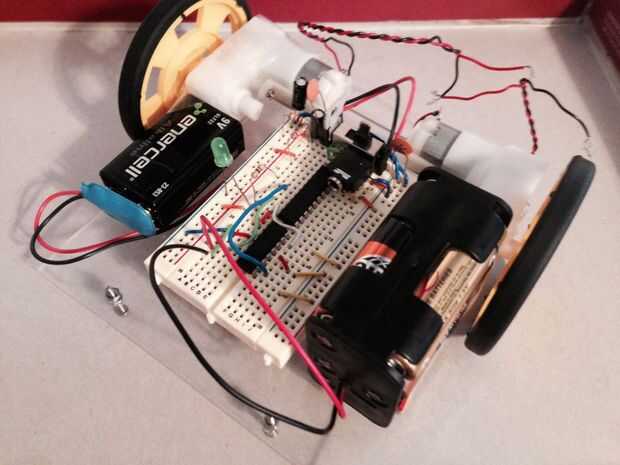
Casi hemos terminado con el hardware; el siguiente paso es añadir el tablero y las pilas para el cuerpo del robot. Utilicé cinta Scotch para unir el protoboard y las baterías del robot, pero usted puede utilizar algo más fuerte si quieres. Tenga en cuenta que probablemente querrá quitar la placa en algún momento, para que epoxy no es probablemente la mejor opción de medio de sujeción.
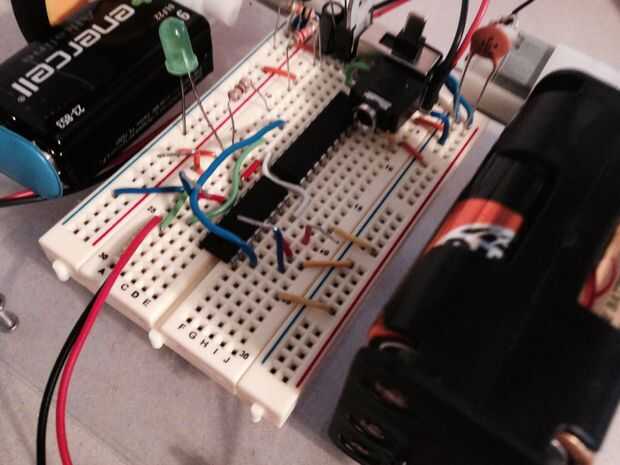
Una vez que la eléctrica se ha colocado en el cuerpo del robot, tomar cuatro alambres e insertarlos en los cuatro puntos siguientes:
- Fila izquierda 20
- Fila 23 izquierda
- Derecho de la fila 20
- Fila 23 derecha
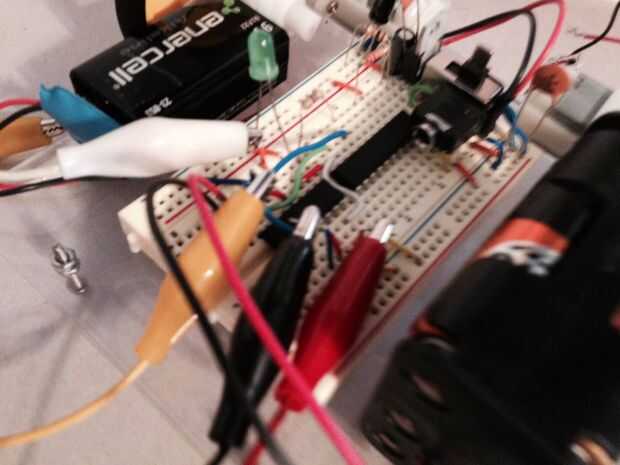
Luego tomar los cables de puente de piel de cocodrilo y, para cada uno de ellos, clip de un extremo a uno de los cuatro cables que solo colocaste. Los otros extremos de estos cables se conectan a los cables de sus motores el puente así:
- El puente izquierdo 20 fila se conecta con el motor izquierdo V-
- El puente izquierdo 23 fila se conecta con el motor izquierdo V +
- El puente derecho 20 fila se conecta con el motor adecuado V +
- Y el puente derecho 23 fila se conecta con el motor adecuado V-
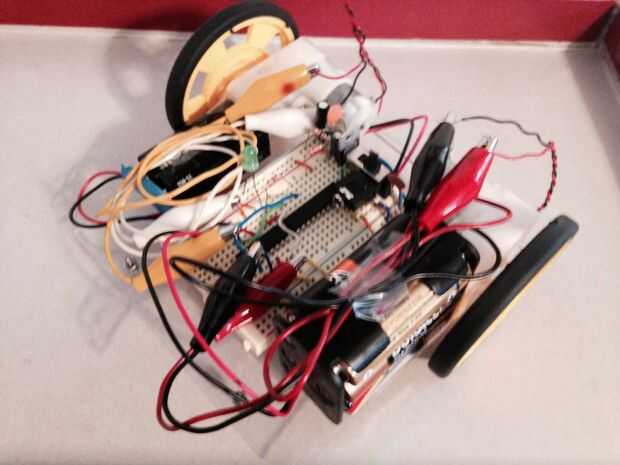
Cinta hacia abajo de los cables de puente para evitar que interfieran con las ruedas, y listo con el hardware!
Nota: Sus motores, cajas de engranajes y ruedas pueden diferir de la mía, sus motores pueden necesitar conectarse de manera diferente. Si vienes al final de este proyecto y encontrar sus motores funcionando al revés, simplemente intercambiar que puente se conecta a cual cable motor, recordando que los puentes izquierdos ir a la del motor izquierdo; del mismo modo que para el derecho.





")







