Paso 12: Personalizar el código de
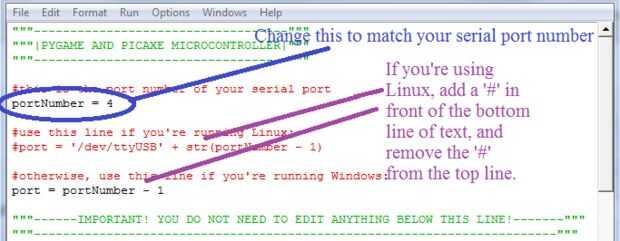
A pesar de que antes he escrito una secuencia de comandos de controlador de robot, tienes que realizar algunas modificaciones leves en el código. Descargar el archivo adjunto .py, luego abrir con cualquiera un compilador de Python, como marcha lenta, o simplemente con un editor de texto básico, como el Bloc de notas. El programa es por defecto de mi número de puerto serie, por lo que si le sucede que tiene el mismo número de puerto que yo, puede omitir este paso. Sin embargo, hay una probabilidad de 99.6% haces no tienen el mismo número de puerto serie como yo, así que probablemente tendrá que cambiar algunas cosas en el código. La imagen de arriba tiene una captura de pantalla del código y las instrucciones sobre cómo cambiar la configuración de puerto serie para que coincida con su sistema operativo.
Para quienes gustan de una explicación basada en el texto, cambiar el número de número de puerto de '4' para el número de puerto serie que tienes en el paso 5. Simple.
A continuación, averiguar si se está ejecutando Linux o Windows. Si está ejecutando Windows, listo, y el programa debería funcionar. Si se está ejecutando Linux, hay dos conjuntos de líneas comentadas por debajo del umbral de número de puerto. Retire el '#' desde el comienzo de la última línea en el primer set y añadir un '#' al principio de la última línea en el segundo set. En este punto, usted debe hacerse así.
Finalmente, conecte el cable serial descargar (pero no se conectan al robot todavía) y asegúrese de que el programa no tire los errores extraños (que no). Si no hay ningún error, entonces usted debe estar listo para rodar!





")







