Paso 4: Protoboard el PICAXE
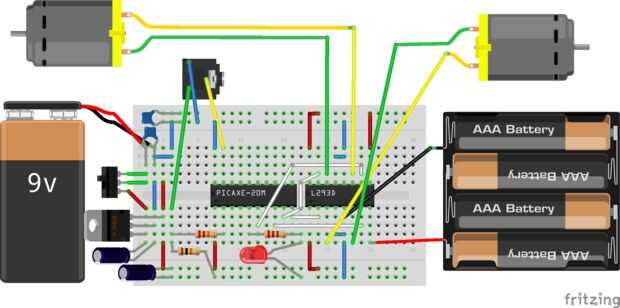
Una imagen vale 1 mil palabras. Compruebe los cuadros arriba para obtener instrucciones paso a paso añadiendo energía 5V regulados a su tablero y el circuito PICAXE básico del edificio. Cada imagen está numerada y tiene una explicación correspondiente más abajo. Imágenes etiquetadas con "poder" Mostrar la configuración de 5V, mientras que imágenes etiquetadas con "PICAXE" pertenecen a la configuración del circuito PICAXE.
También puede utilizar la imagen de Fritzing para breadboard el PICAXE, pero puede que necesite comprobar la lista de las aclaraciones en algunos lugares.
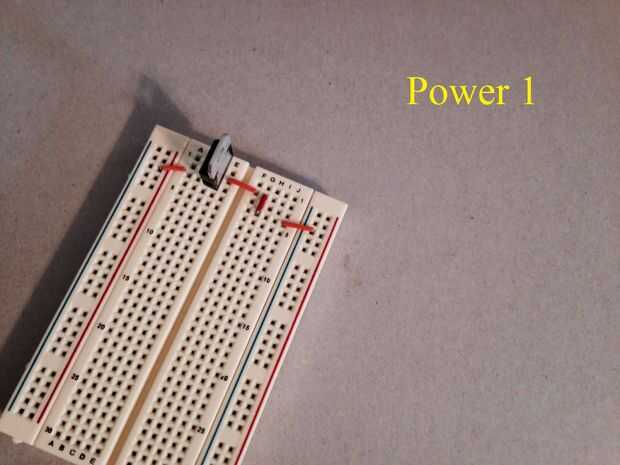
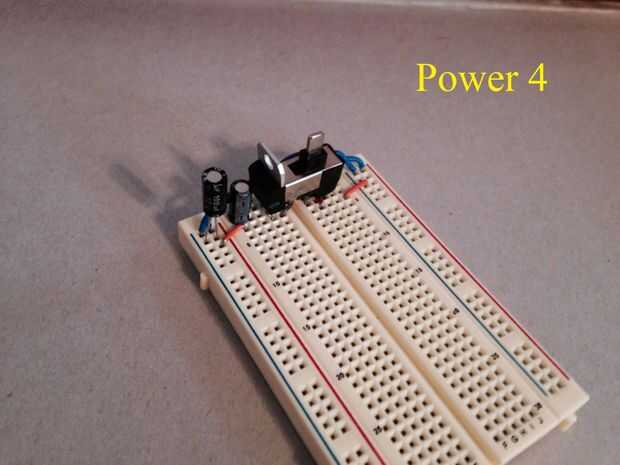
Configuración de la fuente de alimentación de 5V:
- Agregar el regulador LM7805 de potencia en la parte superior de la placa, con la pieza de aluminio hacia la derecha. Añadir los cables entre el autobús VCC fila 3 a la izquierda y a la izquierda, entre la fila 2 izquierda y derecha de la fila 2, entre el derecho de la fila 2 y fila 4 y entre la fila 4 derecha y derecha GND bus.
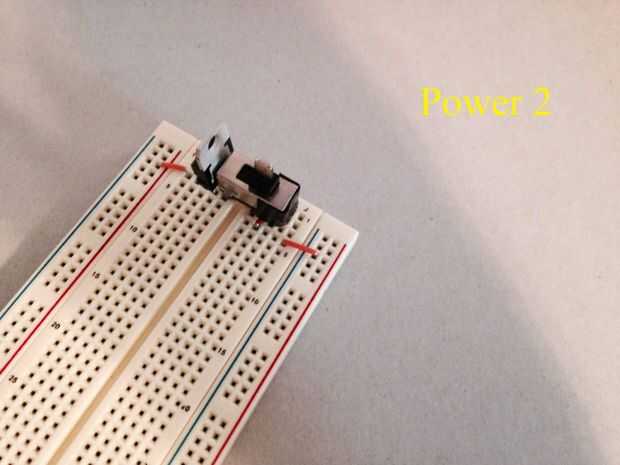
- Añadir el interruptor entre la izquierda de la fila 1 y fila 1 derecha. Mi interruptor tenía unos pines extras, puede ignorarlos.
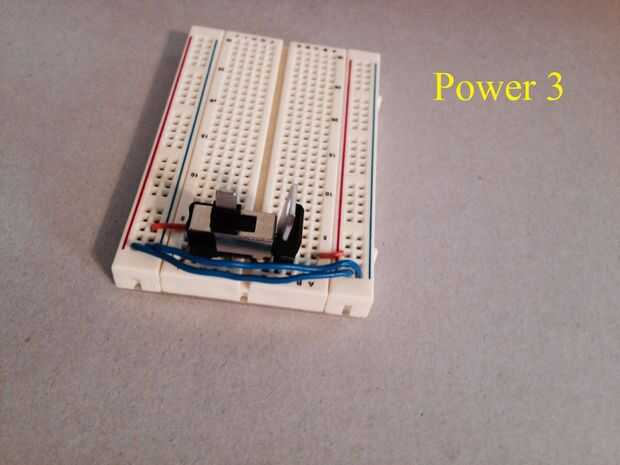
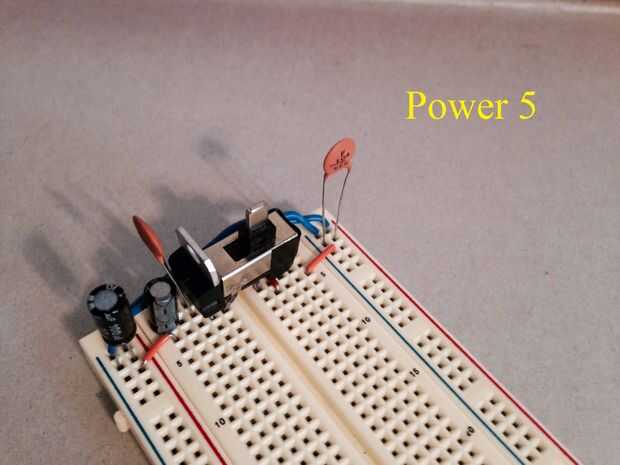
- Conectan el VCC autobuses juntos y la tierra. Ahora tenemos poder y toma de tierra a lo largo de tu protoboard!
- Añadir un condensador de 100uF entre fila 1 a la izquierda y la izquierda, con el lado negativo a la izquierda de la fila 2 la fila 2. Añadir el otro condensador de 100uF entre el autobús VCC izquierda e izquierda bus de tierra, con el lado negativo en el bus de tierra izquierdo.
- Repita con el 0.1uF condensadores.
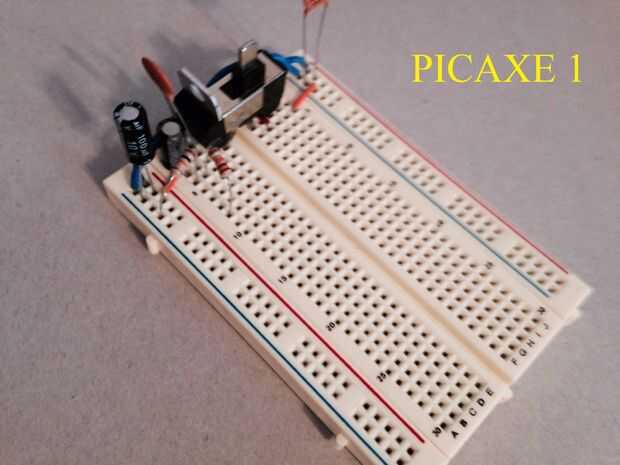
Agregar el PICAXE 20M 2:
- Agregar el resistor de 10K entre la izquierda bus GND y fila 4 izquierda.
- Agregar el resistor de 22K entre la fila 4 a la izquierda y fila 8 a la izquierda.
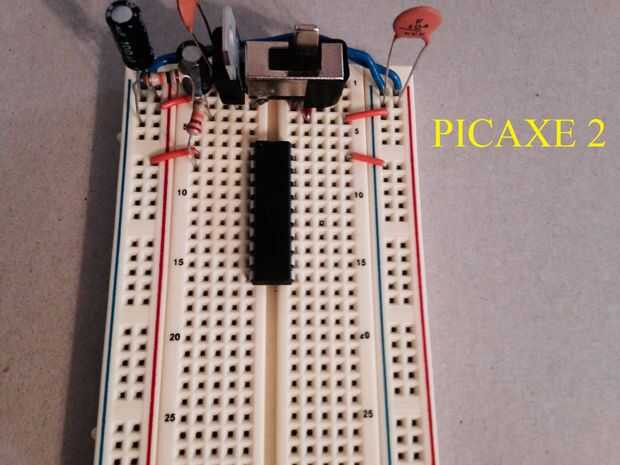
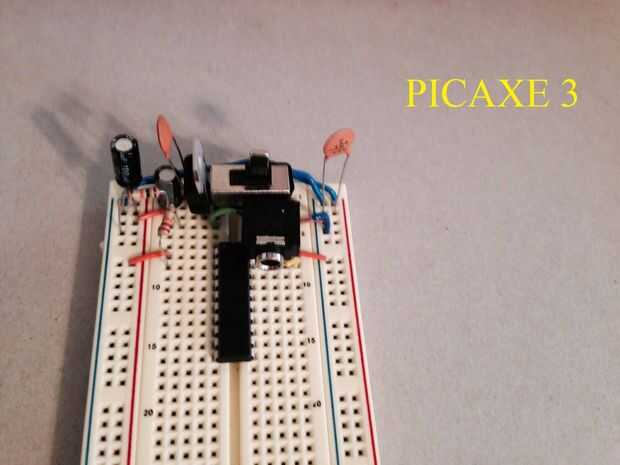
- Añadir el PICAXE 20M 2, con el pin 1 (superior izquierda) en la fila 7 izquierda.
- Añadir cables entre VCC y fila 7 izquierda y entre GND y fila 7 derecha.
- Añadir la toma de descarga, con el cable verde (datos de ordenador) en la fila 4 a la izquierda, el cable amarillo (datos de PICAXE) a derecha de la fila 8 y el cable azul (GND) en tierra.
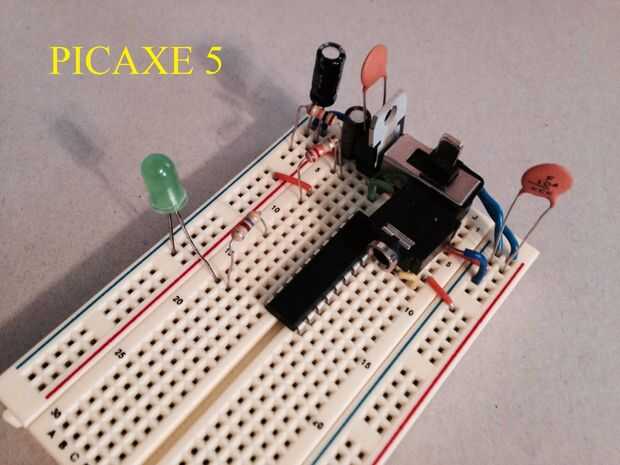
- Agregar el resistor 480 ohmios entre fila 11 e izquierda 17 fila. Añadir también el LED entre la izquierda de la fila 17 y tierra.
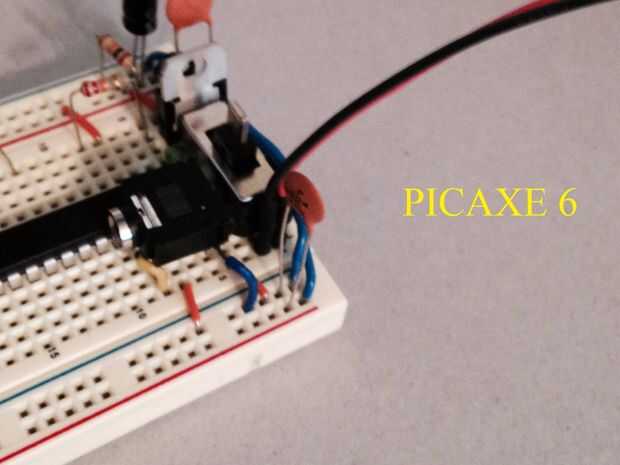
- Añadir la batería de 9V, con V + ir a fila 1 derecha y V-va a la derecha de la fila 2.
En este punto debemos tener un completo circuito PICAXE. Revisar el cableado y asegúrese de que todo está donde debe estar.





")







