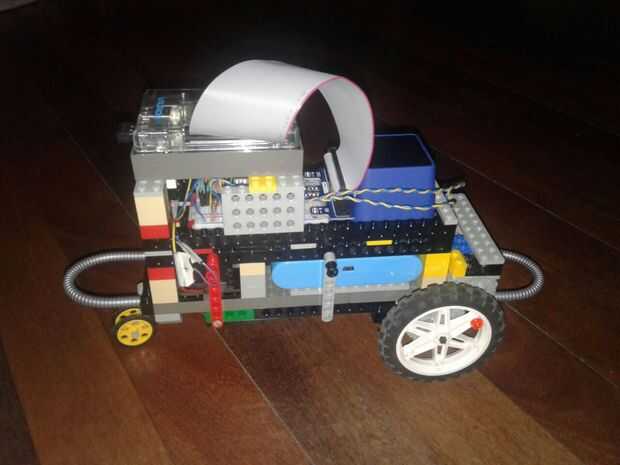

Este es un Robot controlado desde una computadora, ambos conectados a una misma red local vía Wifi, cuyo propósito es él mismo pueda detectar la intensidad de la roja en un lugar determinado, emitiendo un sonido lento en caso de la intensidad de la red Wifi sea estable, o en su defecto emitirá un sonido cada vez mas rápido conforme la señal sea mas débil. Esto con la idea de poder ubicar los puntos en los la red sea inestable y allí colocar un repetidor de la señal para fortalecer la misma.
Componentes necesarios para este proyecto:
- 1 x frambuesa Pi con una SD con Raspbian
- 1 x Protoboard
- 1 x Circuito integrado L293 o SN755410 para controlar los motores (en este Instructable vamos un el usar L293)
- Filtro-regulador tamaños para las conexiones de cables (puentes) de
- 2 x motores DC de 9 voltios.
- 1 x batería de 9 voltios recargable y su conector (para los motores)
- 1 x batería de 5 voltios y 2 amperios para el (Raspberry Pi), funcionan muy bien los bancos de poder párr celulares de 2 amperios
- 1 x Adaptador para wifi por usb
- 1 x Parlante pequeño recargable con permiso de macho conector 3,5 mm
- 1 x interfaz GPIO-protoboard con su Cable de cinta del GPIO
- 1 x Chasis para robots o mucho Lego (en robot de el de este Instructable usaremos Lego para crear)
A continuación, la explicación...







 - Makeblock, Arduino, Droidscript")



")

