Paso 2: Conexiones
Ensamblando el circuito
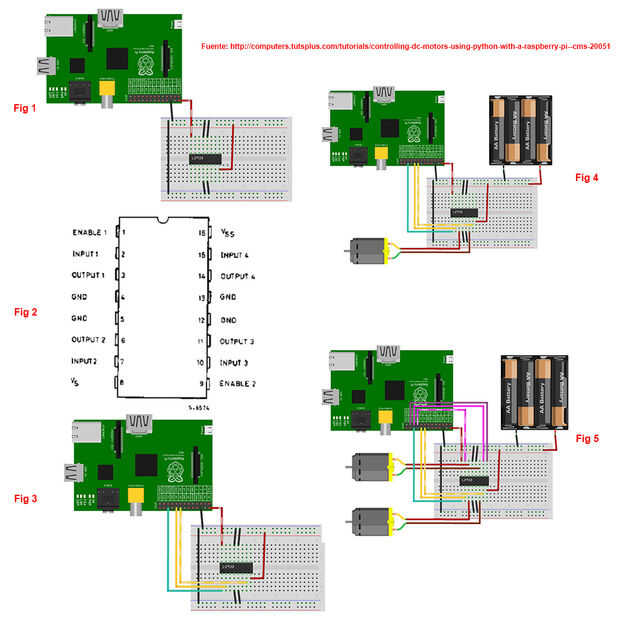
Tutorial de siguiente de la el "at basamos para estas conexiones nos": Conexiones para Motores DC
- Agregar la alimentación y la tierra
Es importante hacer esto mientras el Raspberry Pi está apagado o conectado, para evitar errores por un cortocircuito.
Lo primero hay hacer es conectar los cables de alimentación y tierra. Como se acostumbra por lo general todas las conexiones recibirá una tierra en común. Esto se muestra con los cables negros. (Ver figura 1)
La tierra en el Raspberry Pi esta ya en Pin 6.
La lectura de los números del pin en el Circuito Integrado se hace fácilmente por tener el punto a la izquierda y luego a el partir de la parte inferior izquierda nos da el Pin 1.
Ya los cables de datos
-Agregue tres cables de los pines GPIO al L293D
- GPIO 25-Pin 22 > L293D-Pin 1
- GPIO 18 de 24-Pin > L293D-Pin 2
- GPIO 23 – Pin 16 > L293D-Pin 7
Agregue el motor
Motor – alambre 1 > L293D – pin 3
Motor – cable 2 > L293D-pin 6
Nota:
Es muy importante usted revisar muy bien todas las conexiones antes de poner las baterías. Una vez month, coloque los cables de la batería a la alimentación de la placa.
Agregue el segundo motor
Una de las grandes características del L293D es puede manejar dos motores de forma independiente y cada motor puede funcionar a diferentes velocidades y/o direcciones. El uso de este circuito integrado hace sea posible crear un robot de dos ruedas siendo capaz de ir hacia adelante o hacia atrás fácilmente.
-Agregar un segundo motor produc colocar solamente tres cables más y el motor:
- GPIO 11 – Pin 23 > L293D-Pin 9
- GPIO 9-Pin 21 > L293D-Pin 10
- GPIO conector de 10-19 > L293D-Pin 15
Una vez que ha realizado todas las conexiones colocar su frambuesa Pi, la protoboard con las conexiones y las baterías sobre el chasis del Robot. Lo mejor será colocar los motores y las baterías antes de realizar las conexiones.







 - Makeblock, Arduino, Droidscript")



")

