Paso 6: Conectar los motores
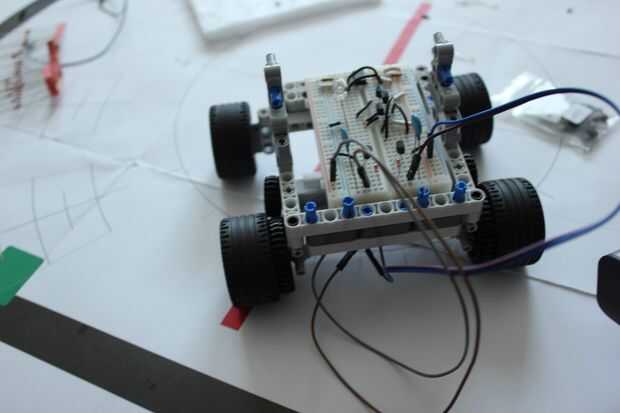
Primero la soldadura de los dos motores para dos cables. poner el motor izquierdo hacia el exterior del robot. Mira el cable del motor cerca de la parte posterior del robot. Esto se llama el plomo trasero. Repita el proceso con el otro motor. Conecte la parte trasera del motor izquierdo a C del transistor izquierdo. Conecte la parte trasera del motor derecho a C en el segundo transistor. Luego conecte el cable restante de ambos los motores a voltaje.
Ahora estamos listos para conducir los motores y se concluyó la construcción de nuestro circuito de driver TTL-Motor. A continuación vamos a analizar las opciones de los modos automáticos y manual para el control de la activación de los sensores.


")




")


")
")

