Introducción
Robots de la famosa película como Wall-E y Johnny cinco tienen visión binocular, no sólo porque es lindo y relacionable, pero puede servir una función práctica. Visión binocular es la manera de la naturaleza de la adición de profundidad a nuestro sentido de la vista. Quiero mostrarles un método que he creado de la construcción de una cámara robótica binocular o estereoscópica que podría utilizarse en el proyecto de RC o videografía.
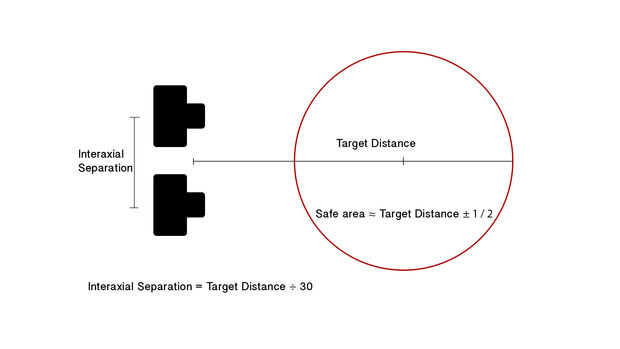
Fotografía estereoscópica ha sido alrededor durante mucho tiempo. Afortunadamente, primeros usuarios han averiguado algunas reglas simples para mejorar el efecto 3D generado por tomar dos fotos lado a lado. Una de estas reglas es la regla de 1/30 (información de estereoscopios). Esta regla se refiere a los ejes de separación entre las lentes de cámara. Esencialmente, la distancia entre cada "ojo" se refiere a qué tan bien como espectadores vemos profundidad en la imagen resultante.
Mi interés motivador es grabar imágenes macro estereoscópica de un sujeto dentro de un pie de la cámara, así que te voy a mostrar un método para reducir el tamaño a la separación de ejes considerablemente mediante el uso de cámaras muy pequeñas. Esto se conoce como hipo-stereo y simula los ojos de organismos pequeños como un ratón o una rana. La imagen resultante hace que pequeños objetos aparecen grandes, lo que quiero. Lo contrario sería Hyper-stereo. La separación de ejes más grande hace objetos de gran tamaño aparecen pequeñas. Puede ver este efecto en películas en 3D a veces cuando tomas areal de las ciudades hacen parecen ser modelos a escala.













