Paso 2: Construir la cámara estereoscópica


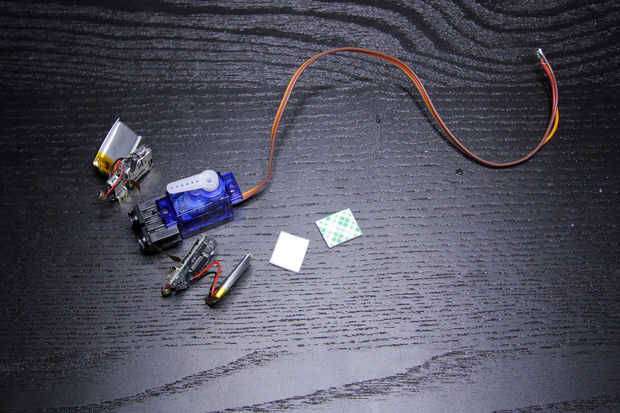

Cuidadosamente separe cada Y2000 y retire la batería, tablero y sensor. Los sensores están conectados a la tarjeta con un cable de cinta muy delicado. Asegúrese de no sobre trabajar este cable y potencialmente romper una conexión.
El micrófono se esconde dentro del componente de montaje para el sensor. Coaxial hacia fuera y se deja pegar al lado, podemos arreglar esta pieza más adelante.
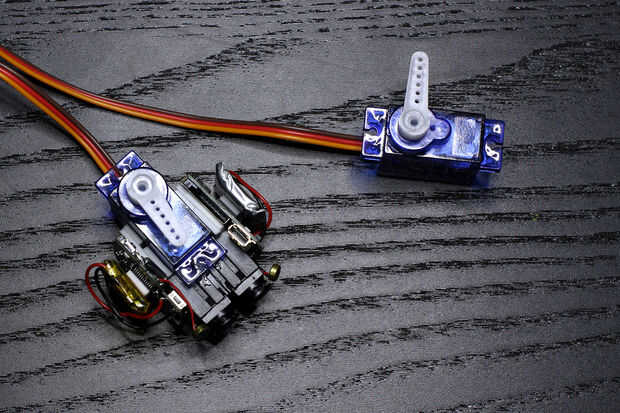
Voltee una de las cámaras para que los montajes de sensor Espejo entre sí. Utilice un palillo de dientes para aplicar pegamento en un lado de cada montaje plástico del sensor y pulse a la vez. Los montajes de sensor plano hacen esto más fácil. Sostener en lugar con unos trozos de cinta. El objetivo es configurar cada cámara apuntada en la misma dirección perfectamente paralelos entre sí.
Aplique pegamento en una lengüeta de montaje en el servo micro enfrente de los cables y conecte los sensores de la cámara en el caso de servo enfrente del eje.
Pequeños cortes de cinta de espuma doble cara y en el puerto de tarjeta SD. Apile las placas pueden conectarse el servo sin pegamento y al ras con los montajes de sensor.
Tomar un par de recortes de espuma con cinta y pegan las baterías LiPo a los tableros.
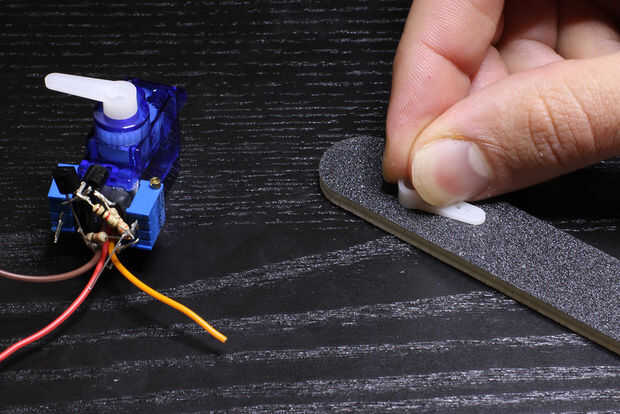
Arena un cuerno del servo con una lima de uñas y marcar el borde del servo sin cámaras en el lado grande. Pegue el horn del servo a la caja del servo. Se trata del punto de pivote para el servo del barrido.
Prueba sus cámaras para asegurarse de que están trabajando. Cada cámara se necesitan ser dados vuelta y set para grabar cada vez que la use. También, usted necesitará cargar bastante a menudo, las pilas muy pequeñas como drene rápidamente. Más adelante describiré cómo trabajar con las imágenes.













