Paso 5: Crear los circuitos de controlador de Servo: caja de Control






Francamente, sentí que este era el paso más difícil, pero tal vez estás mejor en el trabajo con cajas.
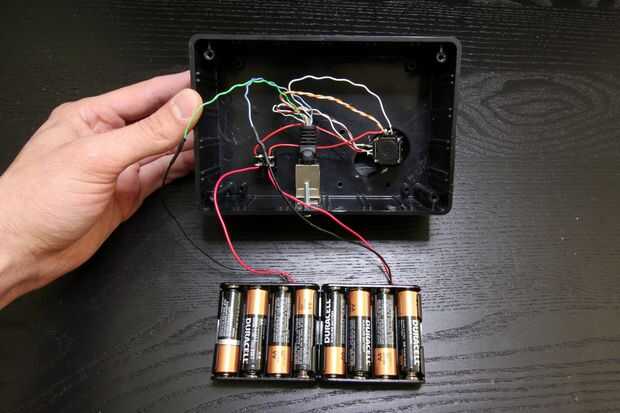
Tenemos que montar la palanca de mando, interruptor, Puerto de Cat 6 y sostener nuestras baterías.
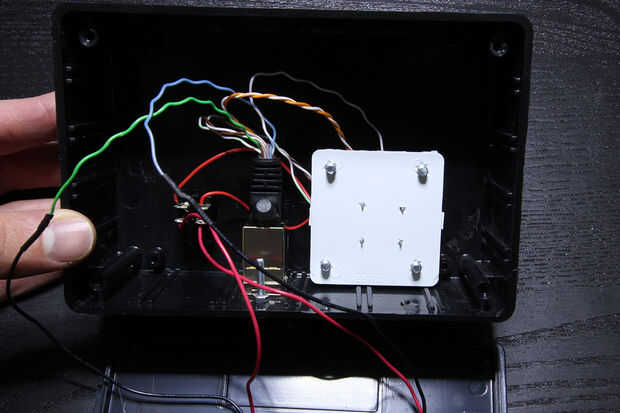
Me corte los orificios en la caja de plástico lo suficientemente grande para poner el interruptor y el puerto a través de y atornilladas con tuercas pequeñas.
Corté un 3/4 "agujero de la palanca de mando de 1 pulgada. Pero el joystick debe estar atornillada a la tapa rondando cerca de ¾" abajo debajo de la parte superior de la caja.
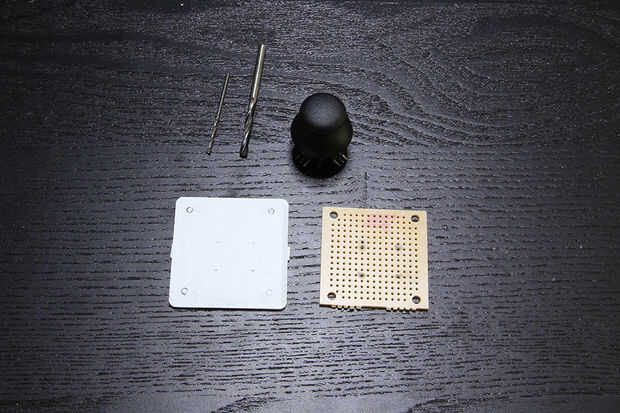
Para resolver este problema, pegué el joystick para una pieza de plástico con cuatro agujeros perforados en la esquina. Estos coinciden con cuatro orificios en la parte superior de la caja. Entonces yo cortar cortas secciones de tubo de plástico (como una pluma vieja) y utilizado éstos como espaciadores para mantener el soporte de joystick colocado debajo de la parte superior del recinto. He utilizado cuatro pernos de 1 pulgada que pase a través de la caja, separadores y joystick placa de montaje para mantener todo en su lugar.
Utiliza cinta doble cara espuma para contener los casos de batería en el recinto y soldar los cables positivos de cada caja de la batería al interruptor. Entonces había suelda los interruptores de cada circuito que empareja los colores del par viene del puerto de Cat 6.
Las macetas de joystick se sueldan el par de cables carril positivo y el cable que va al bote 10 k para cada circuito de PWM.
En retrospectiva, tal vez debería haber sido el circuito PWM en el recinto así, pero quería que parecen una solución adaptable para una cabeza de robot, no una cámara remota, para que en futuro diseña el circuito de control puede permanecer local los servos y algunos otros sensor puede reemplazar el joystick.













