Paso 3: Sensor ultrasónico

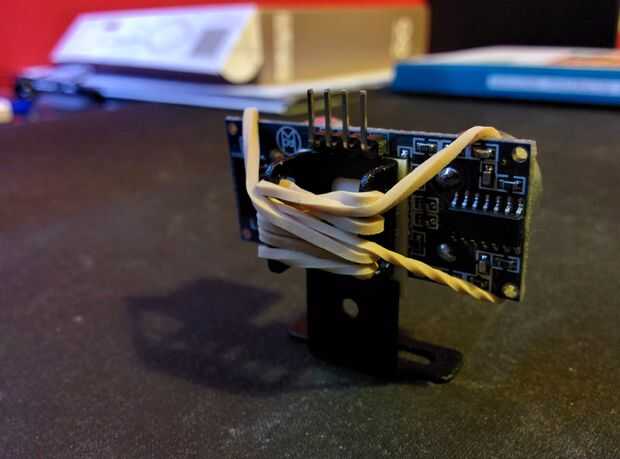


Es el momento para el sensor de distancia. En este proyecto he utilizado un sensor de distancia ultrasonido HC-SR04, que es barato y muy confiable. Sensores ultrasónicos de trabajo como esta; producen un sonido ultrasónico que rebotan en los objetos y luego reciben nuevo. La cantidad de tiempo que el sonido debe ir del sensor al objeto y luego de regreso al sensor nos da la distancia en cm (o cualquier otra unidad). Vamos a hablar acerca de esto en la sección de programación así que no te preocupes.
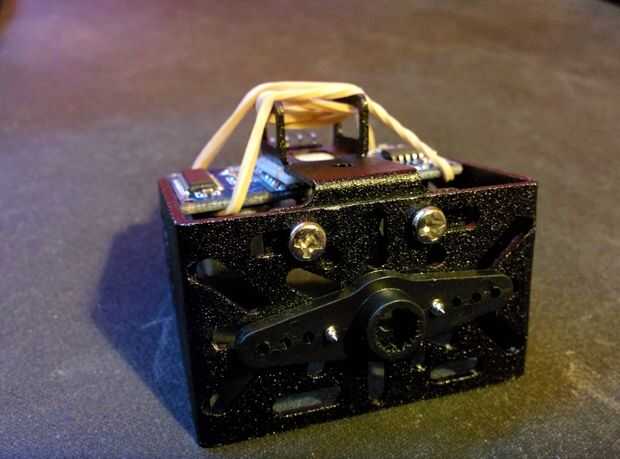
Lo que queremos es colocar el sensor de distancia en el micro servo para que nuestro robot puede verificar la derecha e izquierda cuando se encuentra con un objeto y elija el camino claro a seguir adelante. Utilicé una goma (qué) para apoyar mi sensor y atornillada en un marco metálico que encontré en mi caja de herramientas. Esa manera que me las arreglé para poner en la parte superior del servo micro así que puede moverse. Se puede poner directamente en el servo con un trozo de cuerda para sujetar en su lugar, use su imaginación y ser creativos!!!! Se trata de un único robot hecho de usted!!!!



")








")
 Cómo hacer un OAWR (obstáculo evitando caminar Robot)")