Paso 4: Juntándolo
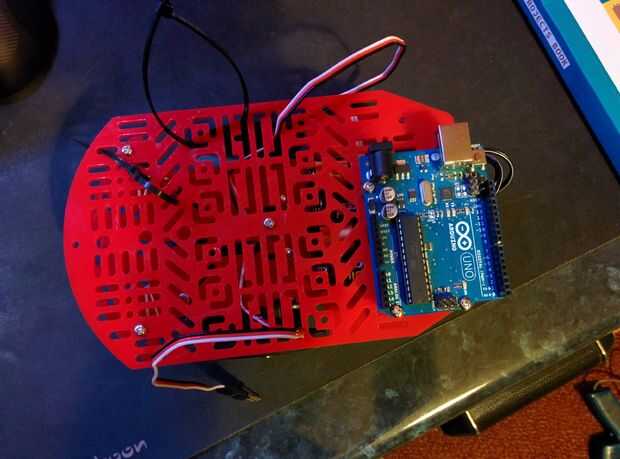
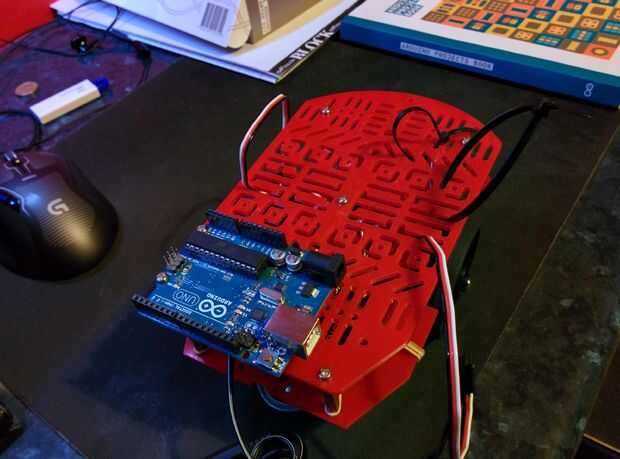

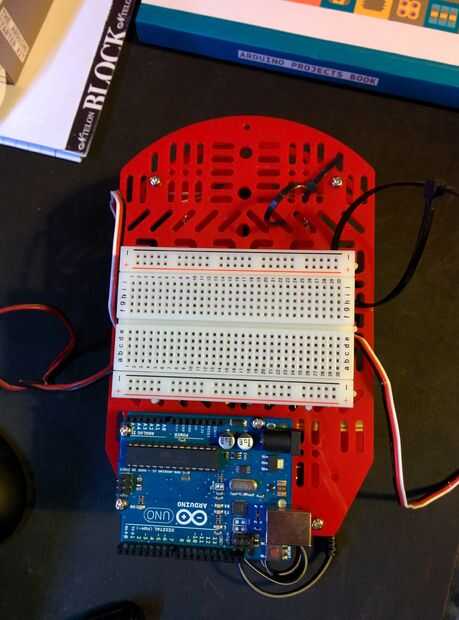




Ahora es el momento de montar la cubierta superior del chasis del mago. Sólo tornillo en su lugar y puso la placa arduino. A continuación poner el soporte de la batería de 9V frente el arduino y la placa en la parte superior. Usé blu-tack para "pegar" togoether por lo que no se mueva. Una vez más, se puede utilizar todo lo que quieras "pegar". Después de eso, poner el micro servo con el sensor de distancia en la parte frontal del chasis y uso de blu-tack para que no lo hay. Usé una amarra para asegurarse de que no se caiga. Asegúrese de que deje un espacio entre la placa y el servo-sensor "torre" por lo que el sensor puede moverse libremente en ambas direcciones (izquierda-derecha). Dejé allí una brecha bastante grande y me resbala mi antiguo smartphone entre ellos para que pueda utilizar la cámara. Aseguró con una sola atadura. De esa manera es segura y puede ponerlo allí o llevarla en la mano muy rápida. Para tener video en vivo de su robot en la pantalla del ordenador, todo lo que tienes que hacer es instalar la aplicación "IP Webcam" en el teléfono smartphone y siga las instrucciones para hacerlo.
También puede poner un interruptor para poder tu robot pero este es un paso opcional. Si desea hacerlo, simplemente corte el cable de energía de las baterías y soldadura en el interruptor. No corte el cable de tierra.



")








")
 Cómo hacer un OAWR (obstáculo evitando caminar Robot)")