Paso 5: Resistencias dependientes de luz y cableado final
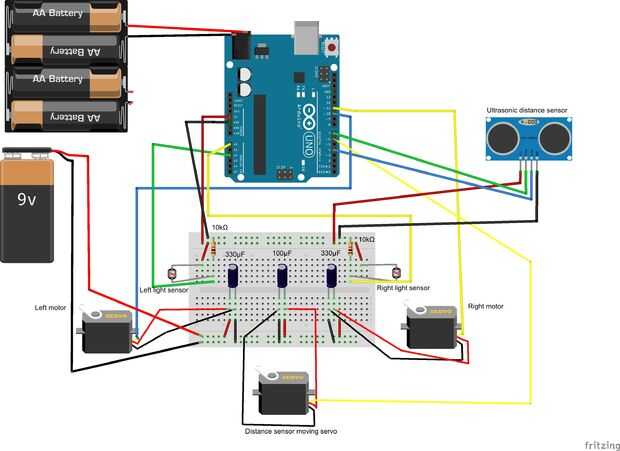
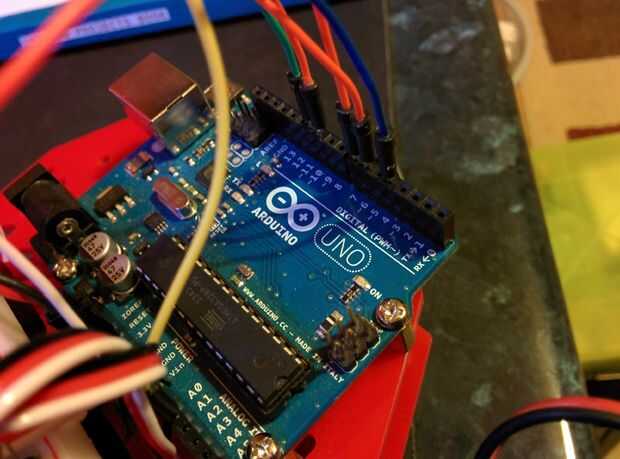
Resistencias dependientes o fotorresistores sólo la luz, son los ojos de tu robot. Son responsables de la detección de luz y dirán a tu robot para pasar a la fuente de luz más brillante. Ponga a su placa, uno en cada lado, para determinar la izquierda - derecha orientación y conecte un extremo de la fotorresistencia con el poder y el otro a la tierra a través de un 10kΩ (kilohm) resistencia. Conecte el fotoresistor izquierda Analog Pin A2 en el Arduino. La photoresitor derecha va a Analog Pin A0. Si tu robot va al lado más oscuro de la habitación en lugar de los más brillantes sólo tiene que cambiar los pernos y va a estar bien.
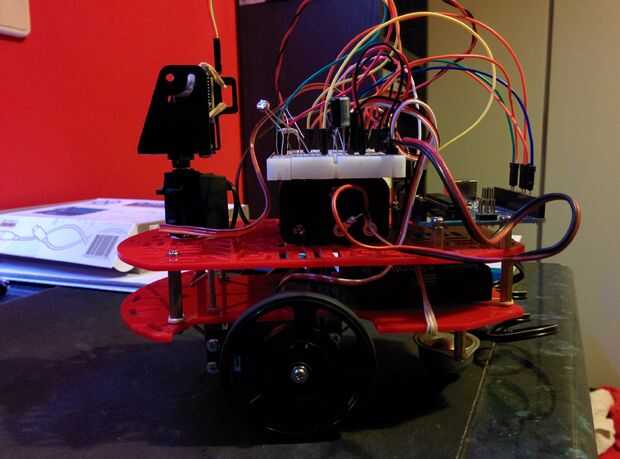
Permite pasar a los servos. Coloque la cabecera de 3 pines de cada uno de los servos en el protoboard. Los colores de los hilos indican el propósito de cada cable. El rojo es para el poder, negro va a tierra y blanco va a Arduino. Tenga cuidado de no meterse con la alimentación y tierra, o de lo contrario puede dañar el servo. Lea cuidadosamente el manual de instrucciones de tu servo y escriba lo que significa el color de cada cable. Cuando un servo motor comience a moverse, dibuja más corriente de la si ya estaban en marcha. Esto causará una caída en el voltaje en la placa. Colocando un condensador a través de la alimentación y tierra junto a las cabeceras masculinas puede suavizar los cambios de voltaje que pueden ocurrir. Para los dos servos de rotación continua utiliza 2 x 330μF condensadores y para el micro servo utilicé condensadores de 100μF x 1. Ser muy cuidadoso para asegurarse de que va a conectar el cátodo a tierra (que es el lado con una raya negra abajo en el lado) y el ánodo al poder. Si pones los capacitores en hacia atrás, que pueden explotar. Ahora Conecte el servo izquierdo a Digital Pin 10 del Arduino y el servo derecho Digital Pin 11. También, conecte el servo micro Digital Pin 6.
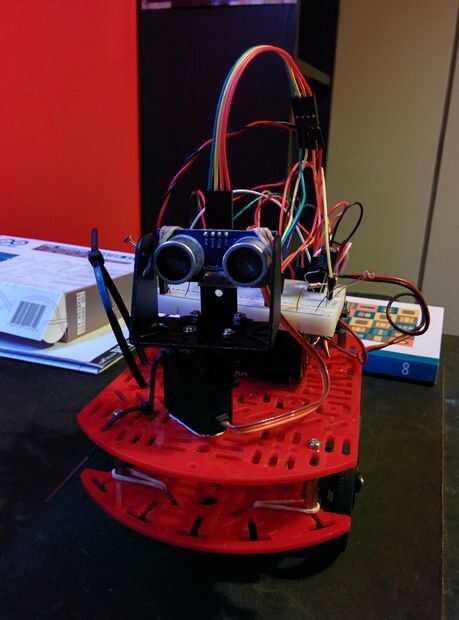
Por último, hay que conectar el sensor de distancia. Conecte el pin de Vcc a la energía, el pin de Gnd a tierra, el Trig pin al Pin Digital 7 y el pin eco Digital 4 de Pin en su Arduino. Eso es él!
Por último, debemos alimentar a nuestra protoboard. Como se puede ver en la imagen que muestra el esquemático de nuestro circuito, he usado dos diferentes fuentes de energía en la misma placa. Uno es para los servos y el otro para los sensores. Ser muy cuidado de no mezclar el cableado porque estarás en problemas. Siga el cuadro esquemático y prestar atención!
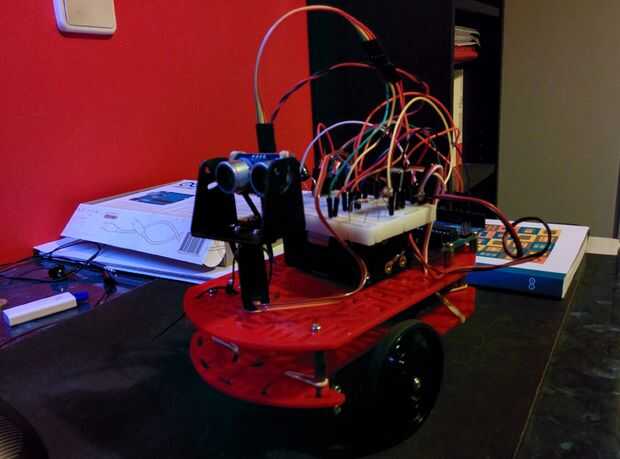
Sólo construimos nuestro robot!!!!!!
Pero no puede hacer nada hasta que programa. Así que vamos a ir!



")








")
 Cómo hacer un OAWR (obstáculo evitando caminar Robot)")