Paso 18: Adelante y atrás motor control

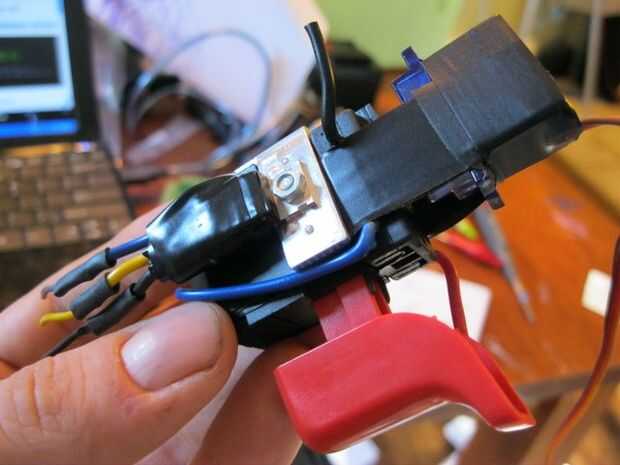









Cofrol interruptor de stock (original o 'como comprado') con un servo poco barato. Estos son havea pequeño motor y un montón de engranajes. Basta con darle algo de poder y entonces dicen qué posición para ir a. Éstos van desde 0 a 180 grados (o 0 a radianes de pi). Son de baja potencia y principalmente de plástico y nylon.
Aquí es cómo -
- conseguir un servo
- Levante para cambiar
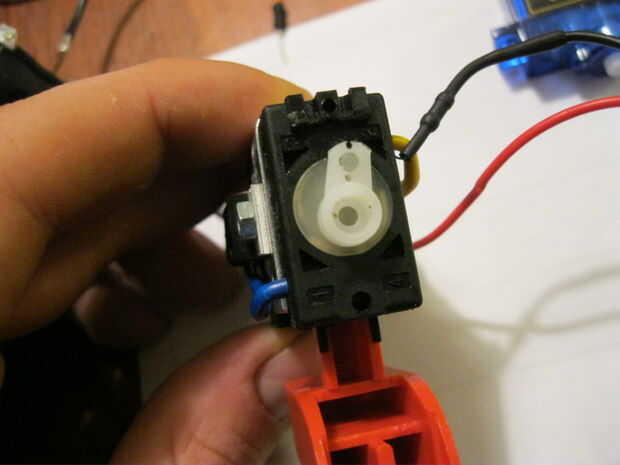
- rasca la cabeza
- encontrar la bolsa de plástico de los engranajes eso él somes con
- complemento de un engranaje en el servo
- Mantenga hasta el interruptor
- de un cuchillo
- Wittle abajo el engranaje para que ello parece que funciona
- vendaje de heridas
- Mantenga hasta el interruptor
Ahora - ge el servo algún poder
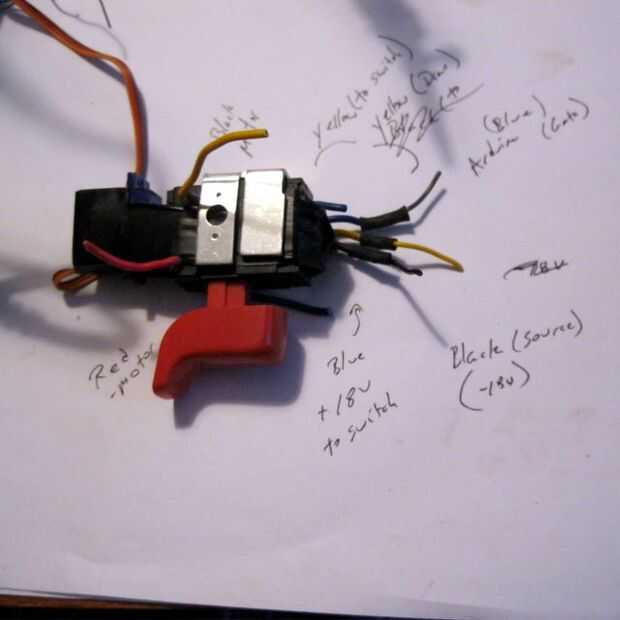
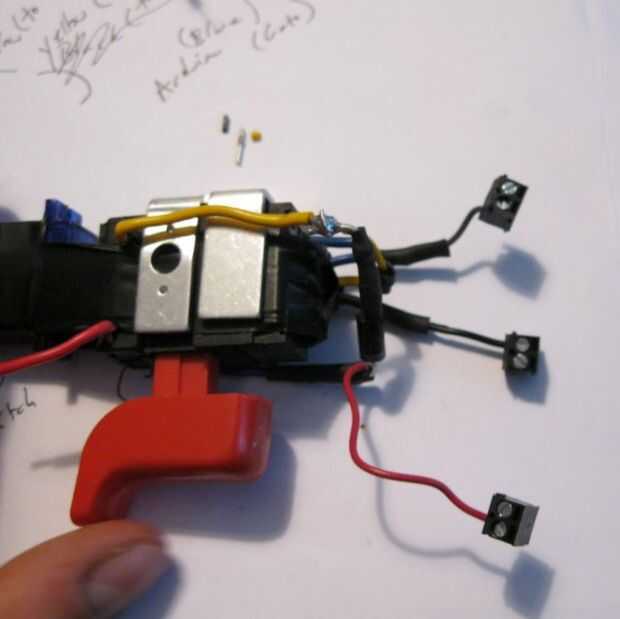
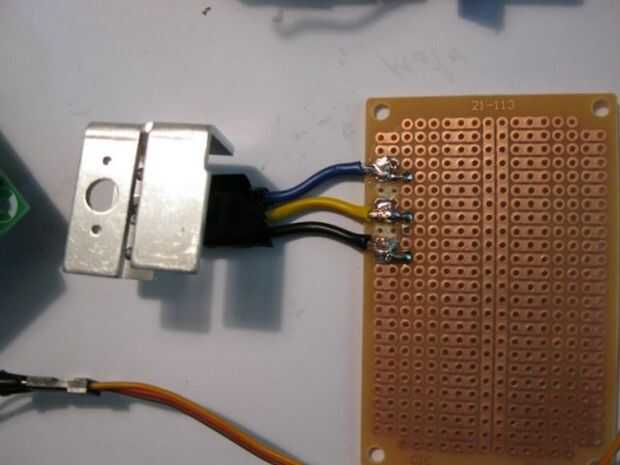
servo tiene 3 líneas de
- marrón/negro - es tierra
- Rojo - es poder - 5 volts para estos
- naranja o amarillo - es comunicación
Ejecutar algún código de prueba con arduino
- Haz arduino
- abrir el ejemplo scetch - bosquejo -> ejemplos -> servo -> barrido
- subir a arduino
- ¿puerto com a la derecha?
- ¿tabla derecha seleccionado?
- pluged en
- ¿más reciente software de arduino en PC?
- Se rompe el tiempo de las board arduino...
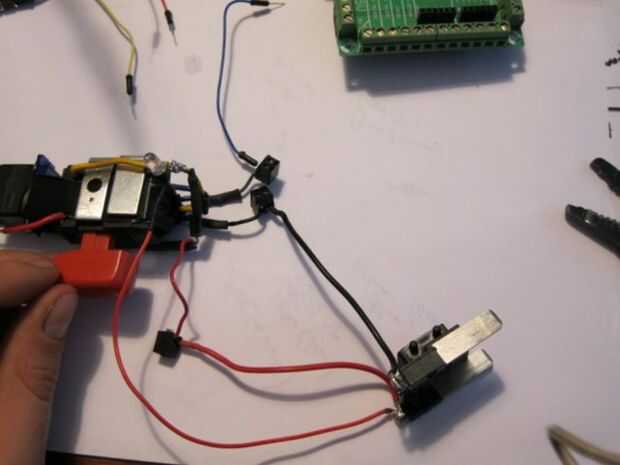
- Servo de alambre para arduino como esta
- Tierra negra-
- Rojo -> 5 voltios
- Naranja -> 9 Digital (PWM)
- Pulsar el rearme (usted realmente debe han desenchufado el arduino al hacer el cableado...)
- Verlo ir!
-Conseguir todos a trabajar
- editar el programa de ejemplo va a 90deg y paradas
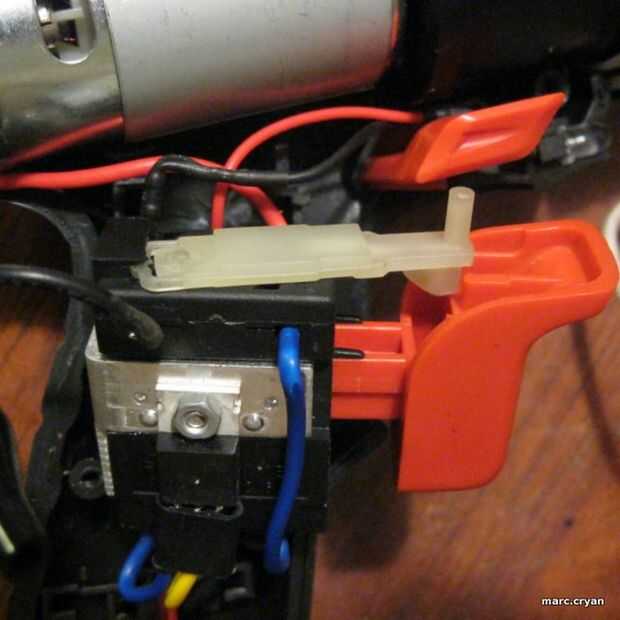
- con srvo en 90deg, mantenerla para cambiar por lo que parece correcto
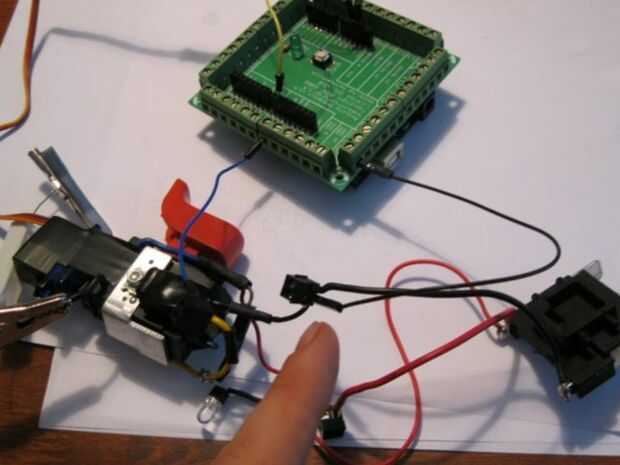
- Sacar el engranaje plástico y bloquearla, para que el interruptor esté en la posición media
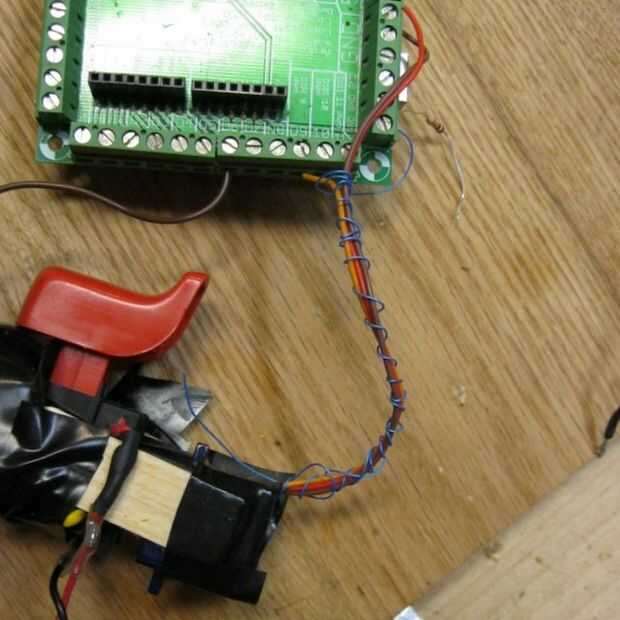
- Cinta togetehr todo con cinta aislante (o hacer algo mejor..)
- Ahora, edidt el el ejemplo de barrido va como esta 90deg de - 45 º----135 grados--90 - 135 - 90--135...
- Carga hacia arriba
- Ahora el servo debe moverse el swtich hacia adelante y hacia atrás... muy mucho
- Hacer ajustes
- Tratan de los servos se dice ir a cualquier ángulo, si no cosas podrían romperse.
- Reducir los ángulos ayuda a---terminé con 90deg - 40deg------140deg (que no parece correcto... 50 - 90 - 140 tiene más sentido)
- Esto funciona mejor, pero el motor aún es el esfuerzo en eitheend
- -Usted podría conseguir todo perfecto---o solo puede limitar cuánto tiempo los motores tratan de llegar a la posición
- Para ello, ajuste el ángulo, espera un momento y después apagar el servo n (hay una función llamada 'separar' que hace esto.
- El código de prueba final está por debajo.
- Esto dice el servo a mover, se produce es un momento (0.3seconds) para mover, entonces tuns el motor
- Esto funciona lo suficientemente bien como para pasar
- (¿por qué fue esta todo una lista numerada? eh...)
Código de Arduino que funciona:
//////////////////ARDUINO//////////////////
Este ejemplo de código es de dominio público.
#include
Servo myservo; crear objeto servo para controlar un servo
int pos = 0; variable para almacenar la posición del servovoid setup()
{
myservo.Attach(9); se fija el servo en el pin 9 al objeto servo
}void loop()
{
myservo.Attach(9);
myservo.Write(90); ir al medio
Delay(300); intenta llegar a posición de 0.3 segundos
myservo.Detach(); que servo renunciar
Delay(2000);myservo.Attach(9);
myservo.Write(140); tiene al lado
Delay(300); tratar de
myservo.Detach(); renunciar a
Delay(2000);myservo.Attach(9);
myservo.Write(90); ir al medio
Delay(300); tratar de
myservo.Detach(); renunciar a
Delay(2000);myservo.Attach(9);
myservo.Write (40); ir a otro lado
Delay(300); tratar de
myservo.Detach(); renunciar a
Delay(2000);
}




")








")