Paso 27: Probar todos los motores con Arduino - Autonomish

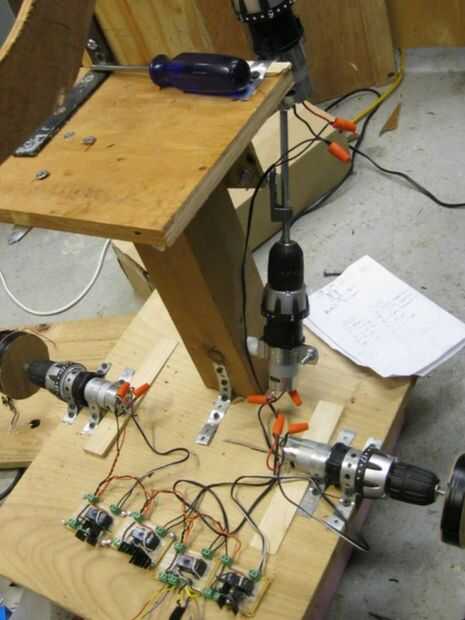
Así que aquí es simple (pero largo) código Arduino.
Se ejecuta cada motor - hacia adelante y hacia atrás - rápido y lento.
///////////////////////// ARDUINO ////////////////////////////
Dirección baja hacia el cuerpo o delante
Dirección = alto del cuerpo o al revés
int RightArmDir = 2;
int RightArmSpeed = 3;
int LeftArmDir = 4;
int LeftArmSpeed = 5;
int WaistDir = 7;
int WaistSpeed = 6;
int RightWheelDir = 8;
int RightWheelSpeed = 9;
int LeftWheelDir = 12;
int LeftWheelSpeed = 10;
int lenta = 20;
int rápido = 40;
int t1 = 500;
t2 de int = 100;
void setup() {}
pinMode (RightArmDir, salida);
pinMode (RightArmSpeed, salida);
pinMode (LeftArmDir, salida);
pinMode (LeftArmSpeed, salida);
pinMode (WaistDir, salida);
pinMode (WaistSpeed, salida);
pinMode (RightWheelDir, salida);
pinMode (RightWheelSpeed, salida);
pinMode (LeftWheelDir, salida);
pinMode (LeftWheelSpeed, salida);
Serial.Begin(9600);
}
void loop() {}
PRUEBAS BÁSICAS / /
Serial.println ("pruebas básicas");
Brazo derecho de prueba
Serial.println ("brazo derecho");
Brazo derecho hacia arriba
Serial.println("up");
digitalWrite (RightArmDir, alto);
digitalWrite (RightArmSpeed, lento);
retardo (t1);
digitalWrite(RightArmSpeed,Fast);
retardo (t2);
digitalWrite(RightArmSpeed,Slow);
Delay(T1);
digitalWrite (RightArmSpeed, 0);
Delay(T1);
Brazo derecho abajo
Serial.println("Down");
digitalWrite (RightArmDir, bajo);
digitalWrite (RightArmSpeed, lento);
retardo (t1);
digitalWrite (RightArmSpeed, rápido);
retardo (t2);
digitalWrite (RightArmSpeed, lento);
Delay(T1);
digitalWrite (RightArmSpeed, 0);
Delay(T1);
Prueba de brazo izquierdo
Serial.println ("brazo izquierdo");
Brazo izquierdo arriba
Serial.println("up");
digitalWrite (LeftArmDir, alto);
digitalWrite (LeftArmSpeed, lento);
retardo (t1);
digitalWrite (LeftArmSpeed, rápido);
retardo (t2);
digitalWrite (LeftArmSpeed, lento);
retardo (t1);
digitalWrite (LeftArmSpeed, 0);
Delay(T1);
Brazo izquierdo hacia abajo
Serial.println("Down");
digitalWrite (LeftArmDir, bajo);
digitalWrite (LeftArmSpeed, lento);
retardo (t1);
digitalWrite (LeftArmSpeed, rápido);
retardo (t2);
digitalWrite(LeftArmSpeed,Slow);
Delay(T1);
digitalWrite (LeftArmSpeed, 0);
Delay(T1);
Cintura de prueba
Serial.println("waist");
De la curva hacia abajo
Serial.println("Down");
digitalWrite (WaistDir, alto);
digitalWrite (WaistSpeed, lento);
retardo (t1);
digitalWrite (WaistSpeed, rápido);
retardo (t2);
digitalWrite (WaistSpeed, lento);
Delay(T1);
digitalWrite (WaistSpeed, 0);
Delay(T1);
Doble hacia arriba
Serial.println("up");
digitalWrite (WaistDir, bajo);
digitalWrite (WaistSpeed, lento);
retardo (t1);
digitalWrite (WaistSpeed, rápido);
retardo (t2);
digitalWrite (WaistSpeed, lento);
Delay(T1);
digitalWrite (WaistSpeed, 0);
Delay(T1);
Prueba de rueda derecha
Serial.println ("rueda derecha");
Delante de la rueda derecha '
Serial.println("Foward");
digitalWrite (RightWheelDir, alto);
digitalWrite (RightWheelSpeed, lento);
retardo (t1);
digitalWrite (RightWheelSpeed, rápido);
retardo (t2);
digitalWrite (RightWheelSpeed, lento);
Delay(T1);
digitalWrite (RightWheelSpeed, 0);
Delay(T1);
Rueda hacia atrás
Serial.println("Backward");
digitalWrite (RightWheelDir, bajo);
digitalWrite (RightWheelSpeed, lento);
retardo (t1);
digitalWrite (RightWheelSpeed, lento);
retardo (t2);
digitalWrite (RightWheelSpeed, lento);
retardo (t1);
digitalWrite (RightWheelSpeed, 0);
Delay(T2);
Prueba de rueda izquierda
Serial.println ("rueda izquierda");
Delante de la rueda izquierda
Serial.println("Foward");
digitalWrite (LeftWheelDir, alto);
digitalWrite (LeftWheelSpeed, lento);
retardo (t1);
digitalWrite (LeftWheelSpeed, lento);
retardo (t2);
digitalWrite (LeftWheelSpeed, lento);
Delay(T1);
digitalWrite (LeftWheelSpeed, 0);
Delay(T1);
Rueda izquierda detrás
Serial.println("Backward");
digitalWrite (LeftWheelDir, bajo);
digitalWrite (LeftWheelSpeed, lento);
retardo (t1);
digitalWrite (LeftWheelSpeed, lento);
retardo (t2);
digitalWrite(LeftWheelSpeed,Slow);
Delay(T1);
digitalWrite (LeftWheelSpeed, 0);
Delay(T1);
PRUEBAS DE LUJO / /
Serial.println ("pruebas de lujo");
Tocar suelo
Tocar el cielo
Posición inicial
Giro izquierda
Girar derecha
Ir delante
Ir hacia atrás
Baile de robot
Serial.println("REPEAT...");
}




")








")