Paso 4: Paso 4: cableado para arriba y destella el código
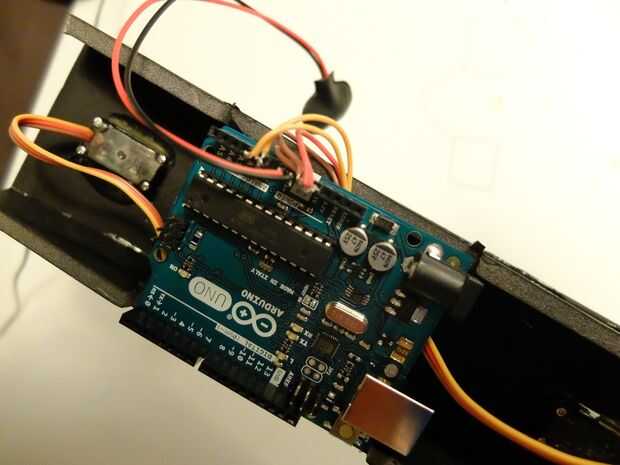
Fije los pernos de la rúbrica a los pines de Arduino siguientes:
Pareja uno: PWM-pins. PWM-cable de servo delantero servo posterior a1 y A0
Par dos: + y gnd de servos. Rojo negro a gnd y 5V
Par tres: conector de la batería. Rojo negro a gnd y vin
---el código---
#include
Servo frontServo; Servo backServo;
int frontPos = 90; cambiar este número para centrar las patas delanteras
int backPos = 90; cambiar este número para centrar las patas traseras
Velocidad
int velocidad = 200; Esto va a cambiar la velocidad de marcha, mayor número = más lento, más bajo = más rápido
void setup() {}
frontServo.attach(A0);
backServo.attach(A1);
}
void loop() {}
frontServo.write(frontPos + 20);
Delay(Rate);
backServo.write (backPos - 20);
Delay(Rate);
frontServo.write (frontPos - 20);
Delay(Rate);
backServo.write(backPos + 20);
Delay(Rate);
}




")








