
1) dos transistores NPN BC337
2) dos LDR
3) dos motores de corriente continua de 100 RPM
4) un soporte de batería de 9v
5) un protoboard
6) algunos cables
OPCIONAL
1) ruedas
2) unas pinzas (para conectar los cables de protoboard)
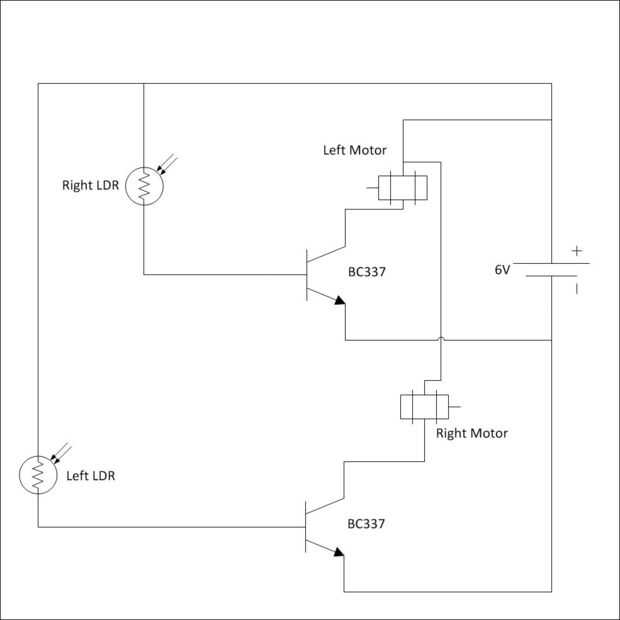
que permite hace este robot
Conecte una LDR en el tercer agujero de j filas y rema el primer agujero. luego conectar el transistor en protoboard tal que su colector en fila del segundo agujero, con base en agujero tercera fila, emisor en agujero cuarto de la fila. conectar el motor derecho de la fila j agujero primero y segundo. ahora conectar el LDR próximo tercer agujero último de la fila j y último agujero de la fila. luego conecte el transistor del siguiente tal que su colector en agujero segundo último de la fila, base en el tercer último agujero y el emisor en el último cuarto agujero. ahora Conecte el motor izquierdo de la fila j segundo y último fin del agujero. Ahora conecte un cable desde el primer agujero de la fila f para el segundo agujero de la fila e luego conecte otro cable del agujero cuarto de la fila f al primer agujero de la fila d. luego conecte un cable desde el primer agujero de la fila c al cuarto agujero pasado c fila. Ahora conecte otro cable del segundo agujero de la fila b al último agujero de la fila b. luego conecte otro cable del cuarto agujero último de la fila f a cuarto último agujero de la fila e. Conecte otro cable del último agujero de la fila f al último agujero de la fila e. ahora la fuente de alimentación. Conecte el cable negativo (negro) de soporte de la batería de 9v al primer agujero de la fila. Conecte el cable positivo (rojo) al último agujero de la fila.
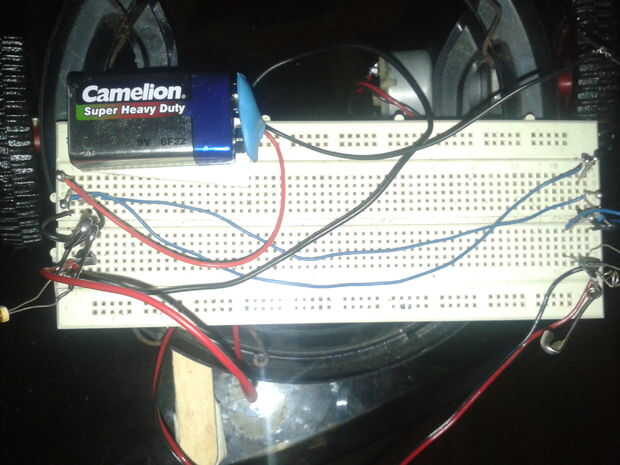
ahora nuestro seguidor luz de chorro simple es ready.i utilizadas pernos para conectar los cables en la placa, puede utilizar enganchado los cables o clavijas de cabecera para conectar los cables en la placa. usé una batería de 9v para alimentar este robot. es un robot sencillo y fácil de hacer. Si tiene dudas consulte el diagrama del circuito. ¡ DISFRUTE!







")
 (PIR)")




