Paso 2: Los sensores


El límite de la arena se identifica por una línea blanca gruesa distintivo 2cm. Esta línea blanca fue utilizada por el robot de sumo para detectar donde se encuentra el borde. La línea blanca se detecta mediante 4 sensores de línea infrarrojos digitales. Este sensor fue elegido debido a su trazado de circuito integrado comparador que convierte la salida en una señal digital. El beneficio de la señal digital es y que resulta simple de interfaz con el microcontrolador es capaz de responder más rápido para la detección de la línea.
Nombre: TCRT5000 módulo línea seguimiento Sensor fotoeléctrico comparador
Peso: 1,1 g
Max Dimensiones: 10.6x34.7x9.45 (WxLxD)
Método de interfaz: interfaz 3 pines, VCC, la salida y la tierra.
Fuente de alimentación: 5V DC
Salida corriente: 1mA
Alcance eficaz: 0,2 mm a 15 mm
Costo: $1,89
Conexión y alimentación:
TCRT5000 módulo línea seguimiento fotoeléctrico Sensor comparador es accionado por la C.C. 5v utilizando sus pines VCC y GND. Esta energía es entregada por el regulador de voltaje construido en la placa del microcontrolador ATMega128 y por el 11.1v batería de polímero de litio de 1300mah. El pin de salida en el sensor de línea proporciona una señal de bajo nivel cuando sobre una línea negra y una señal de alto nivel cuando sobre una línea blanca. Por lo tanto, el sensor puede simplemente interfaz con el microcontrolador a través de un solo pin de entrada digital. Más adelante se da una esquema de conexión eléctrica.
Los sensores de línea digital han sido lugar delante de las ruedas delanteras y la parte trasera de las ruedas traseras. Esto permite la detección de la línea de límite blanco de la arena mientras se mueve en todas direcciones y señala al robot que está en el borde y la necesidad de alejar. Los sensores fueron elegidos por su tamaño pequeño, ligero y de costo efectividad.
Sensores de ultrasonidos
Para la detección del objeto sensores ultrasónicos fueron elegidos por su capacidad para detectar objetos en proximidad cercana, así como del diámetro completo de la arena (~1.5m). Los sensores ultrasónicos seleccionados son ligeros, fáciles de interactuar con y barato.
Nombre: HC-SR04 rango ultrasónico sensores
Peso: 8,2 g
Max medidas: 45x20.6x15 mm (WxHxD)
Método de interfaz: interfaz 4 pines, gatillo, eco, VCC y GND.
Fuente de alimentación: 5V DC
Corriente quieta: < 2mA
Ángulo eficaz: < 15°
Desde la distancia: 2cm-500 cm
Resolución: 0,3 cm
Costo: $2,58
Conexión y alimentación:
El Sensor de rango de ultrasonidos HC-SR04 es accionado por la C.C. 5v usando sus pines VCC y GND. Esta energía es entregada por el regulador de voltaje construido en la placa del microcontrolador AtMega128 y por el 11.1v batería de polímero de litio de 1300mah.
Las interfaces HC-SR04 al microcontrolador a través de sus pines Trigg y eco. Cada uno de estos pines se conectan a uno de los pasadores de IO digitales del microcontrolador. Más adelante se da una esquema de conexión eléctrica.
Adquisición de una lectura implica el siguiente proceso:
1. 10μs pulso se envía al pin de disparo
2. ultrasonidos salidas ocho pulsos de ultrasonidos de 40 kHz
3. detecta el eco de vuelta.
4. medida de la distancia es proporcional a la anchura de pulso de eco
5. la distancia se calcula mediante la fórmula: distancia = ((Duration of high level)*(340m/s))/2
6. Si no se detecta ningún obstáculo, el pin eco dará una señal de alto nivel para 38ms
Este proceso se repite cada vez que un sensor de lectura se requiere. El código C de AVR se da más adelante.
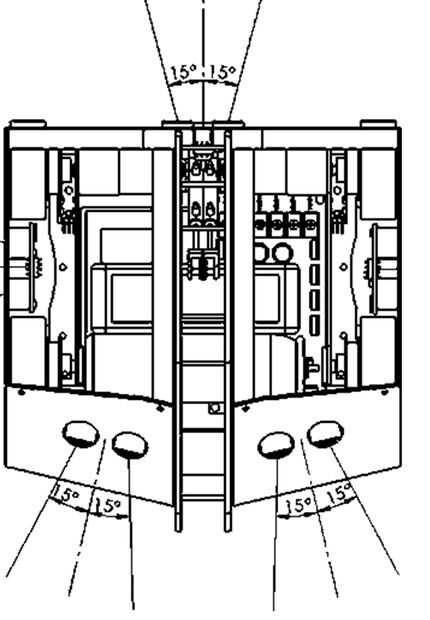
Los sensores ultrasónicos se han colocado para la máxima eficacia y cobertura. Cada sensor tiene un ángulo de detección de 15 º de su eje cada manera. La gama máxima del sensor ultrasónico es 5 metros, debido al tamaño de la arena que este fue limitado en software sólo buscar objetos dentro de un rango de 1,4 metros.
")




")



 utilizando un Arduino")



