Paso 1: Diseño y concepto
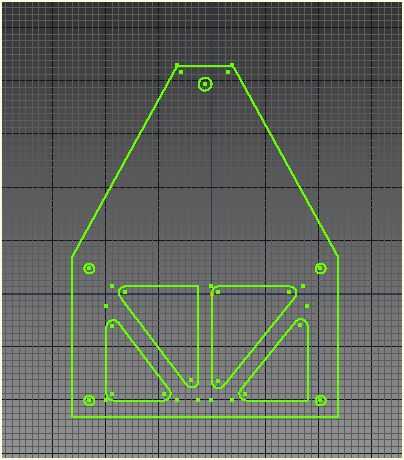
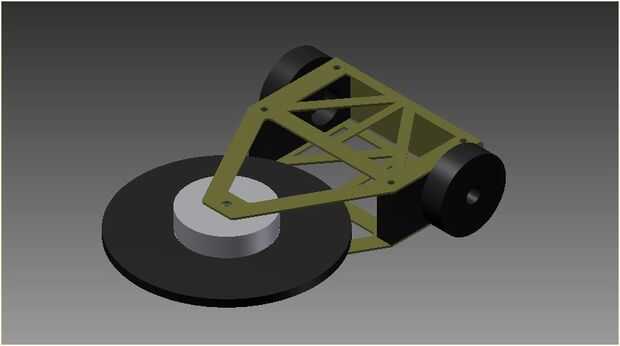

, pero con el disco en 6" dia el robot habría tenido que ser cómicamente grande que cualquier estabilidad. Me lo pensé más y decidió hacer una ruleta horizontal. Después de mirar muchosotroshorizontalhilanderos colocó en el diseño bastante genérico que comparten muchos hilanderos horizontales. Que es una forma triangular semi con arma en la parte delantera y las ruedas en la parte posterior.
Ahora que tenía el arma y el diseño general del robot podía comenzar trabajo en el diseño de todo lo demás. Yo primero determina los componentes que quería usar. Fui con dos de Fingertech TinyESC y 1000 rpm motores con 2 1/4" ruedas de coche porque la combinación es lo suficientemente rápida como para un un robot. Decidí ejecutar el robot en el 3s o 11.1 v porque ya tenía 3s lipo baterías y un cargador sobraron de otro proyecto.
Para realmente diseñar el robot utilicé Autodesk Inventor. Yo primero modelar el área necesaria por cada componente del robot y entonces pensé a lo pequeño pude hacer el robot y aún así encaja todo. El otro reto fue mantener bajo peso. Diseño de un programa de CAD hecho todo más fácil que el otro método de diseño utilizo que es físicamente cada componente y luego dibujar un contorno en la cartulina.







")





