Paso 1: Cosas que necesita
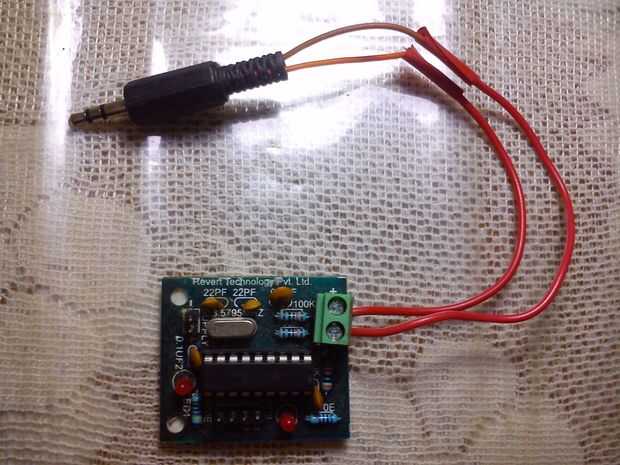








1:-módulo de DTMF (http://www.ebay.in/itm/like/20119037796).
2:-ARDUINO UNO.
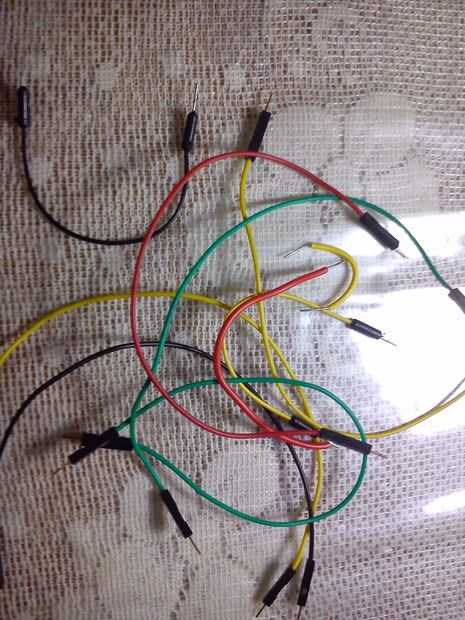
3:-los cables de puente (macho a hembra y de macho a macho).
4:-SENSOR ULTRASÓNICO PING (SE PUEDE UTILIZAR EL SENSOR HC-SR04 DEMASIADO PORQUE ES MÁS BARATO PERO TIENES QUE MODIFICAR EL CÓDIGO QUE EXPLICO EN LA SECCIÓN DE CÓDIGO).
5: - 2 SENSOR de I.R. (http://www.amazon.in/ROBOSOFT-SYSTEMS-Single-Sensor-Module/dp/B00U3LKGTG/ref=sr_1_cc_3?s=aps & ie = UTF8 & qid = 1427820514 & sr = 1-3-catcorr & keywords = ir + sensor + módulo)
6:-2 TABLEROS DE PAN.
7:-controlador de MOTOR L293D (http://www.amazon.in/L293D-Push-Pull-Four-Channel-...) TAMBIÉN puede utilizar el L293D módulo disponible en (http://www.ebay.in/itm/like/271552019152)
8:-2 RUEDAS Y 2 MOTORES PASO A PASO CON LA CAJA DE ENGRANAJES (DISPONIBLE EN AMAZON) SI UTILIZAS LOS MOTORES SIN ENGRANAJE DE LA CAJA ENTONCES NO SERÁN CAPACES DE PROPORCIONAR SUFICIENTE PAR PARA MOVER LAS RUEDAS CUANDO EL ROBOT SE COLOCA EN EL SUELO. "EXPERIENCIA PERSONAL"!!!!!!
9:-el teléfono uno móvil con 3,5 mm soporte para JACK, y uno para llamar.
10:-PEQUEÑA CAJA.
11: - DOBLE LA CINTA ECHADA A UN LADO.
12:-2 baterías (trate de usar duracell). Puede utilizar un cargador de 5v para la prueba.

")



")

")
")




