Paso 9: Primeros intentos
Temprano en mi carrera incrustado tuve un rápido ir a hacer mis propios robots utilizando PCB casero, motores PIC microcontroladores y buscapersonas. Llegué bastante lejos pero conducir las ruedas directamente del eje del motor demostró para ser un poco mucho para los motores. Lamentablemente parecen haber sido tirar ahora o que hubiera tomado fotos.
Llegó el momento de añadir algunos engranajes.
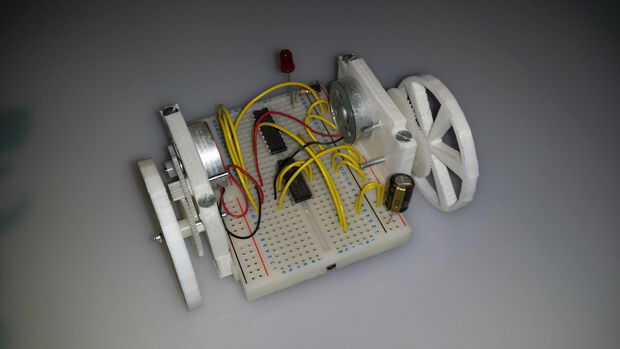
Es mi próximo intento con 3D impreso piezas y un tablero como el chasis y el PCB. Esto funcionó, pero estaba bastante lejos de ser ideal.


 -")










