Paso 5: Construcción de parte de los componentes 2
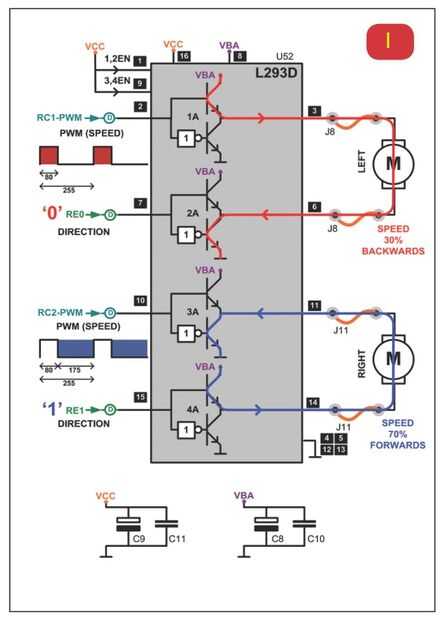
El video muestra los pasos para controlar el mundo real hardware uso de ancho de pulso modulado (PWM) basado en salidas. El PWM salidas en coche un conductor del motor de puente H IC como el L293D. Cada motor tiene una señal PWM para la velocidad y una segunda señal para controlar la dirección del motor.
Cuando la señal de dirección es una lógica 0 de que deber PWM de 255 es toda velocidad y un deber 0 se detiene.
Cuando la señal de dirección es una lógica 1 para invertir la dirección del motor se detiene un deber PWM de 255 y deber de 0 es la velocidad máxima.


 -")










