Paso 6: Construcción de parte de componentes 3
El video muestra los pasos para crear distancia y sensores de línea a iniciar el entorno de detección.
Empezaremos por crear un sensor de distancia muy simple de crear un objeto de posición oculta y comprobación de colisiones. Los sensores de línea utilizan a exactamente el mismo principio.
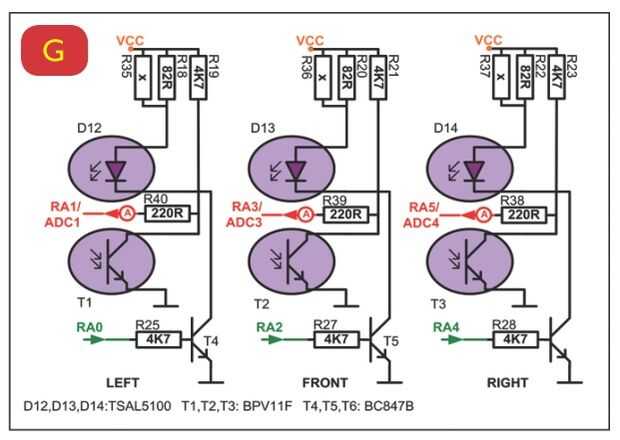
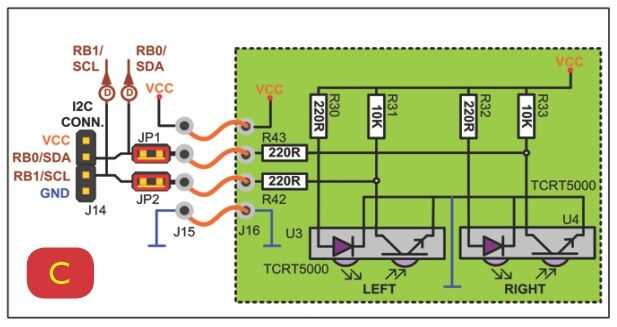
El robot de mundo real simplemente puede usar un sensor de infrarrojos y el ADC a bordo para tomar lecturas de proximidad por lo que también añadimos el código para esto. G muestra el trazado de circuito de sensor de proximidad de IR y de imagen C muestra el circuito del sensor de IR línea.
Para tener en cuenta ambiente niveles de luz tomamos primero un ADC con el emisor de IR apagado. Luego encienda el emisor de IR y esperar un corto período de tiempo para el receptor de IR reaccionar. Terminamos tomando un segundo ADC leer y apagar el emisor de IR para ahorrar energía. La primera lectura de IR se resta de la segunda para dar nosotros la lectura de proximidad válida.
También son la fuente del componente, componente exportación y mi programa de prueba de componentes.


 -")










