Este gesto controlado utiliza robot Arduino, acelerómetro ADXL335 y par transmisor/receptor de RF.
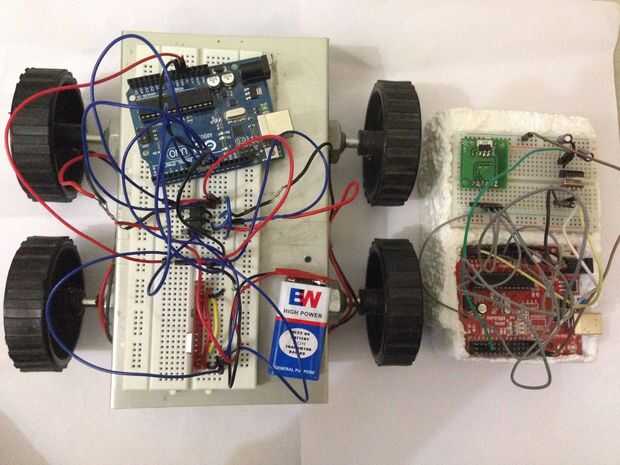
Dividiremos el robot entero en 3 partes el emisor, el receptor y el robot.
Los diferentes gestos que se ha asignado a la dirección de los bot son-
Mano paralela a la tierra inmóvil
Mano inclinada hacia adelante-hacia adelante
Mano inclinada hacia atrás backward
Inclinado de la mano derecha-derecha
Mano inclinada izquierda
He hecho el transmisor de thermocol aunque también puede ser hecha en un guante.






")



")


