Paso 1: Materiales necesarios

Transmisor-
- Arduino Uno
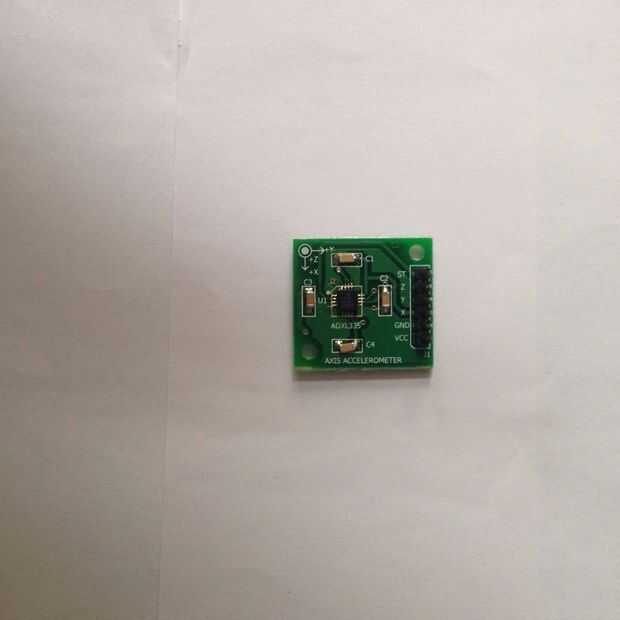
- Acelerómetro ADXL335
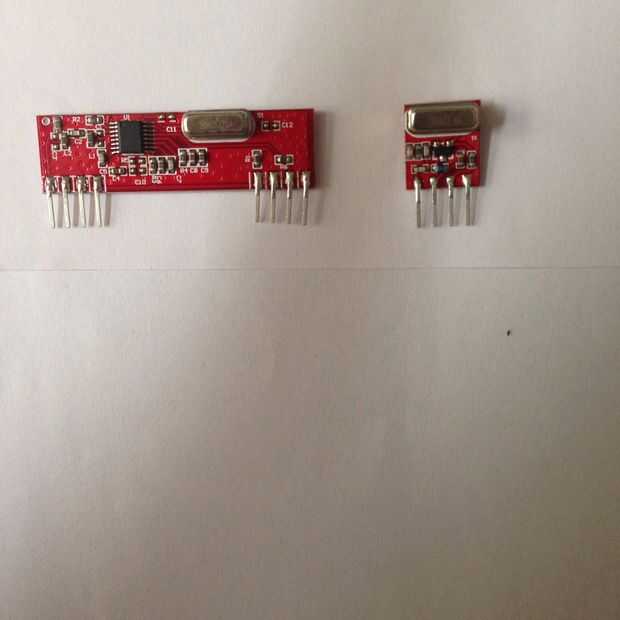
- Transmisor de RF de 433 MHz
- Protoboard
Para el receptor y el robot-
- Arduino Uno
- Receptor 433 MHz RF
- Controlador de motor L293D IC
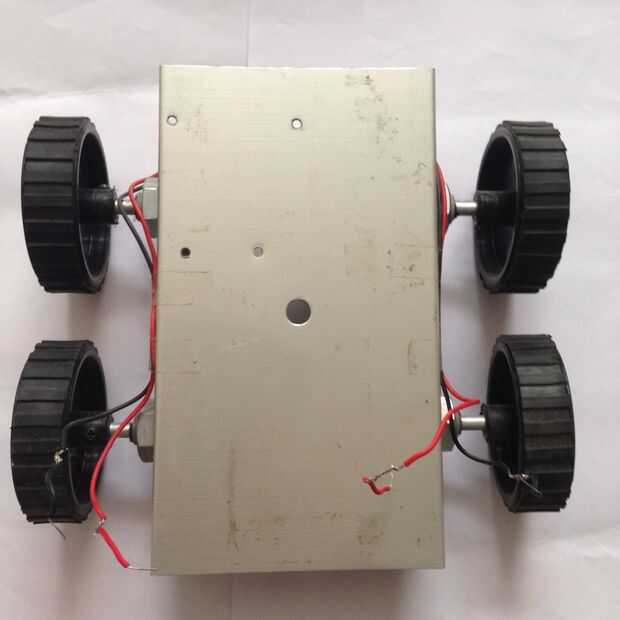
- Chasis y ruedas
- 2 motores DC
- Protoboard
Por supuesto usted también necesitará jumper cables y baterías de 9V
En lugar de usar el Arduino y protoboard en el transmisor como hice yo, en su lugar puede utilizar un ATMega328p, que puede ser programado desde la placa Arduino y soldadura junto con el transmisor de RF y ADXL335 en un perfboard.
El perfboard puede sujetarse a un guante. No obstante aquí he utilizado un mando como configuración con los gestos de la misma






")



")


