Paso 2: Montaje del robot
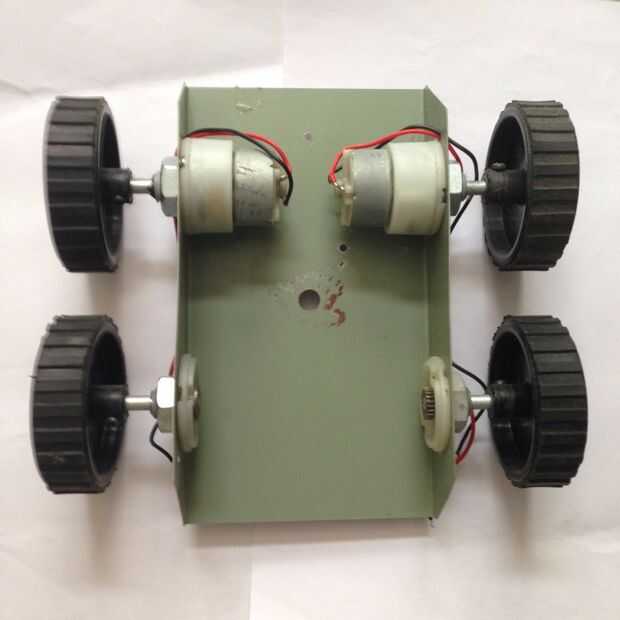
Fijar las ruedas en el chasis.
Montar los motores en las ruedas traseras y ruedas de maniquí para el frente.
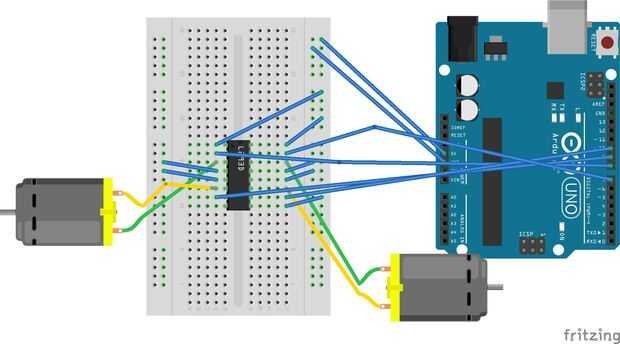
El CI L293D de montaje en el protoboard y se coloca sobre el chasis
Coloque el Arduino en el chasis y hacer las conexiones del L293D como sigue
4,5,12,13 a la tierra
1,9,16 a VCC(5V)
3.6 a la izquierda motor(output)
11,14 a derecha motor(output)
2,7,10,15 para pernos de 8,9,10,7 de Arduino(inputs)
8 para batería de 9V






")



")


