Este instructivo se vaya sobre el código de LabVIEW que escribí para el control de un robot justa. Se trata de una explicación detallada del código. Si usted no está interesado en la explicación, el VI de LabVIEW está ligado en el último paso.
Para el robot, he utilizado dos servos continuadas, un joystick, un acelerómetro, un mini servo y un sensor de fuerza. También se utiliza el Kit de computación física de LabVIEW LabVIEW Inicio paquete y chipKIT WF32. Para comunicarse con el WF32 sobre su WiFi incorporado, usé LabVIEW MakerHub LINX. Para ver un listado de las partes, revisa el tutorial de cableado de robot justas.
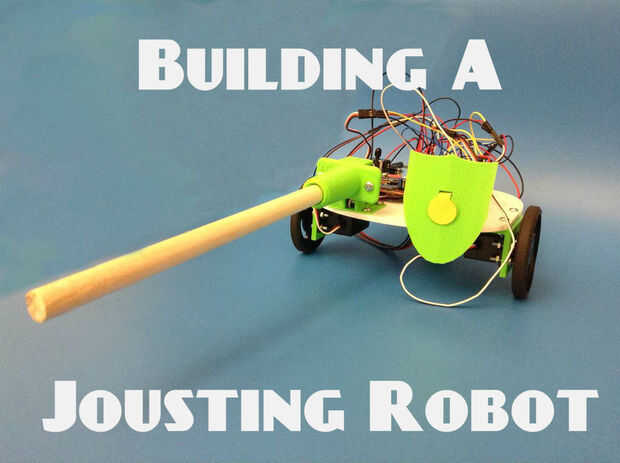
La idea general de este proyecto era crear un robot que puede ser controlado por WiFi y enviar datos de nuevo a LabVIEW. En primer lugar, sería un estado de configuración donde podía fijar el ángulo de la "lanza" montado en un servo utilizando el Pmod Joystick. Una vez que se empuja un botón en el PmodJSTK, el robot entrarían en un estado de ejecución. En este estado los servos funcionaría hasta que se sintió una fuerza o si el robot fue recogido. Una vez que el robot fue recogido, el estado restablece al estado de configuración a menos que ha habido 3 rondas justas, en cuyo caso, la sesión justa terminaría.
El robot tiene tres puntos de golpe para comenzar con y cada vez que durante el estado de ejecución si la fuerza pasa por un determinado valor, disminuyen los puntos de golpe por una. Si los puntos de golpe reducir a cero, terminará la sesión justa.
Compruebe hacia fuera este Instructable sobre el cableado para el robot y comprueba este Instructable ver como montar el 3D impreso piezas.
")

 y LabVIEW")




")





