Paso 1: LINX e inicialización de Sensor
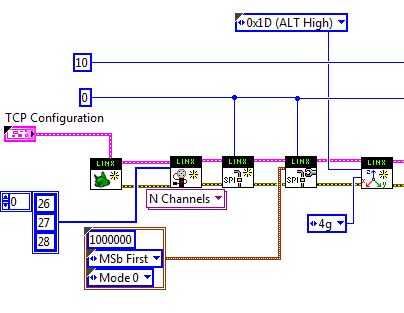
La primera parte del código es inicializar LINX y todos los sensores. En este caso, LINX, los servos, el joystick y el acelerómetro necesitan ser inicializado.
Puesto que el WF32 está conectado via WiFi, se utilizó el control de la configuración de TCP donde se especifica la dirección IP del robot y el puerto. Para configurar el WiFi con MakerHub LINX, revisa este tutorial.
A continuación, los servos se inicializan en el pin 26, 27 y 28 y se crea la conexión SPI a PmodJSTK. PmodJSTK opera a 1MHz y envía los datos en el modo 0 con el primero de la MSb.
PmodACL (el acelerómetro) se establece en una gama de ±4g y la dirección de esclavo por defecto 0x1D (Alt alto).
Lo siguiente es crear el bucle principal del programa.
")

 y LabVIEW")




")





