Paso 4: Estado 1: configuración parte 2
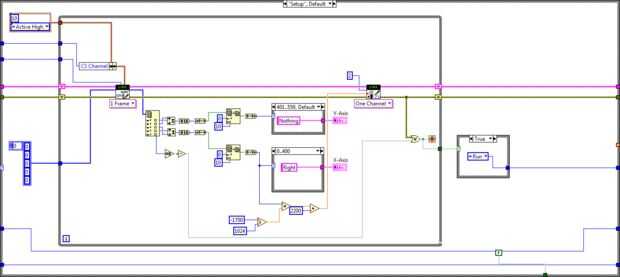
El servo había utilizado va desde Estados Unidos 500 a 2200 uS legumbres. Los puntos de servo izquierda con un valor de 500 puntos y nos con un 2200 nos pulsos. El valor entero se transformó en una anchura de pulso deseado tal que cuando el PmodJSTK era izquierda, el servo se gire a la izquierda y cuando el PmodJSTK era correcto, el servo se gire a la derecho.
Esto se hace haciendo una calibración lineal donde el entero de PmodJSTK fue multiplicado por (500-2200) y dividido por el valor de toda la gama de 1024. 2200 entonces fue agregado para hacer una correcta calibración lineal.
Vuelta hacia la izquierda, la palanca de mando salida 1024. Mediante la calibración, esto le dará una anchura de pulso de 500uS que corresponde a la servo hacia izquierda.
El último byte de la PmodJSTK contiene información sobre los botones de a bordo. Si ninguno de los botones se presiona, este valor es 0. Si uno o todos los botones se presiona, este valor es distinto de cero. Así el estado de la instalación se termina cuando se presiona un botón en el Pmod porque el byte resultante será distinto de cero, dando por resultado un valor false desde el bloque de comparación. El bloque "no" se utilizó para cambiar este valor en true y luego el verdadero valor es enviado a detener el tiempo bucle. El verdadero valor se alimenta también en una estructura case después del tiempo bucle que envía el estado de "Ejecutar" en la estructura principal de caso utilizando el registro de desplazamiento.
Un valor false se envía también al bucle principal que continúa funcionando.
")

 y LabVIEW")




")





