Paso 6: Estado 2: ejecutar la parte 2
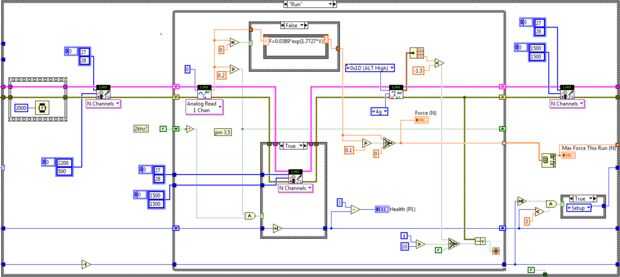
En el tiempo bucle, si se detecta una fuerza suficiente de la analógica Lee bloque (valor mayor que 0, 2V), un verdadero valor es enviado a un bloque "y". Este bloque "y" también está conectado a un registro de cambio y el valor inicial es una constante falsa. Esta estructura se utiliza para que no hay codigo postal múltiples lecturas true una vez que el valor de la fuerza supera el umbral. En primer lugar, se envía un valor false a la y estructura y la tensión está por debajo de 0, 2V.
Cuando el voltaje pasa por encima de 0, 2V, un verdadero valor es enviado a la "y" y el valor anterior (false) se invierte con el "no" que le da un verdadero valor en la "y" así. Puesto que el bloque "y" recibió dos constantes verdadero, envía un valor true en la estructura del caso.
Para la siguiente iteración del bucle, el valor de tensión muy probablemente será mayor que 0, 2V, pero el verdadero valor de la iteración anterior es enviado en el registro de desplazamiento e invertido para dar una constante falsa. Así el bloque "y" Lee T y F, que resulta en el caso falso. Una vez que el valor de la tensión cae por debajo de 0, 2V, estamos a la configuración original.
Una vez que el bloque "y" envía un valor true, los puntos se reducen en 1 y los servos se detengan para evitar daños en el robot.
Si falso (foto de arriba), los recursos sólo son alimentados a través de la estructura del caso.
Una vez que el acelerómetro (orientación invertida) lee una aceleración menor a-1.5 g (robot que se levanta), un verdadero valor es enviado al botón de parada para terminar el tiempo bucle.
En una nota relacionada, puesto que puede haber fluctuaciones de tensión cuando la primera lectura el acelerómetro, 10 iteraciones del bucle deben pasar antes de que la aceleración puede terminar el tiempo bucle. Esto se hizo mediante otra función select para devolver F cuando el número de iteraciones del bucle es menores de 10 años y entonces devuelve el valor verdadero o falso de la aceleración sea inferior a - 1,5 g después de 10 iteraciones.
")

 y LabVIEW")




")





