Paso 7: Estado 2: ejecutar parte 3
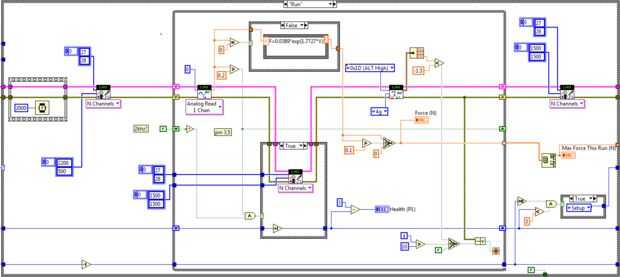
En caso de que el robot no fue golpeado y así mantenerse corriendo, después el lazo está sobre (robot es recogido), se fijan los anchos de pulso para apagar los servos. La fuerza máxima para la que también se registra y este valor está indexado en el bucle principal para que el máximo valor para todas las carreras se puede medir así.
Al entrar en el estado de ejecución, las rondas permanecen constantes es reducido por uno.
Si las rondas restantes es igual a cero o si la salud es menor que cero, la estructura del caso alimenta el estado de "Parada" para el cambio de registro. De lo contrario, el estado de "Setup" es devuelto a.
Una constante falsa también se envía al bucle principal para que siga funcionando.
")

 y LabVIEW")




")





