Paso 8: Estado 3: parada y cierre de la comunicación
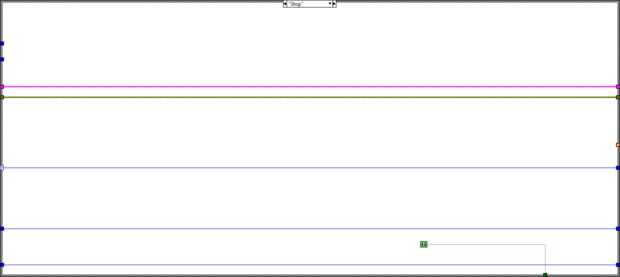
En este estado, todos los requeridos recursos se alimentan en los registros de cambio y una constante verdadera es enviada a la parada del bucle principal. Esto termina el programa.
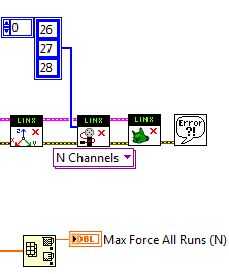
Una vez el bucle principal, todo lo que queda es cerrar los sensores y LINX. El acelerómetro comunicación, comunicación de servo y LINX comunicación están cerradas y la fuerza máxima de cada serie sea indexada en el bucle principal y la fuerza máxima de todas las ejecuciones se divulga.
")

 y LabVIEW")




")





