Paso 8: Programa y cable para Arduino
void setup()
{
Serial.Begin(9600);
pinMode (2, salida);
pinMode (3, salida);
pinMode (7, entrada);
pinMode (12, salida);
pinMode (13, salida);
pinMode (8, entrada);
pinMode (4, salida);
pinMode (5, salida);
pinMode (6, salida);
}
Código para hacer el trabajo de motores con el botón (se dirige mediante un potenciómetro:
void loop()
{
Si (digitalRead(7) == LOW)
{
digitalWrite (13, HIGH);
int x = analogRead(1);
Serial.Print(x);
Serial.Print("\n");
Si (x < 1023/3) {}
Gire a la izquierda
digitalWrite (2, bajo);
digitalWrite (3, alto);
}
else if (x > 2 * 1023/3) {}
Gire a la derecha
digitalWrite (2, alto);
digitalWrite (3, bajo);
}
Else {}
hacia adelante
digitalWrite (2, alto);
digitalWrite (3, alto);
}
}
otra cosa
{
digitalWrite (13, bajo);
digitalWrite (2, bajo);
digitalWrite (3, bajo);
}
Código para hacer el cañón de agua con un botón:
Si (digitalRead(8) == LOW)
{
comunicados de la válvula
digitalWrite (12, HIGH);
}
otra cosa
{
digitalWrite (12, bajo);
}
Código a la dirección el robot se moverá cuando se presiona el gatillo usando tres colores luz LED:
int x = analogRead(1);
Si (x < 1023/3) {}
digitalWrite (4, alto);
digitalWrite (5, bajo);
digitalWrite (6, bajo);
}
else if (x > 2 * 1023/3) {}
digitalWrite (6, alto);
digitalWrite (4, bajo);
digitalWrite (5, bajo);
}
Else {}
digitalWrite (5, alto);
digitalWrite (4, bajo);
digitalWrite (6, bajo);
}
}
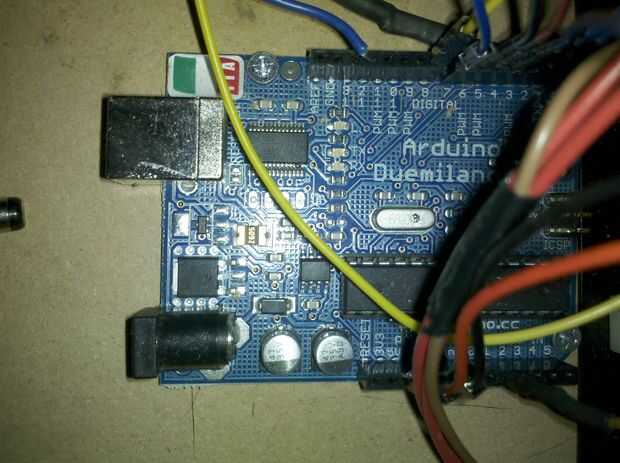
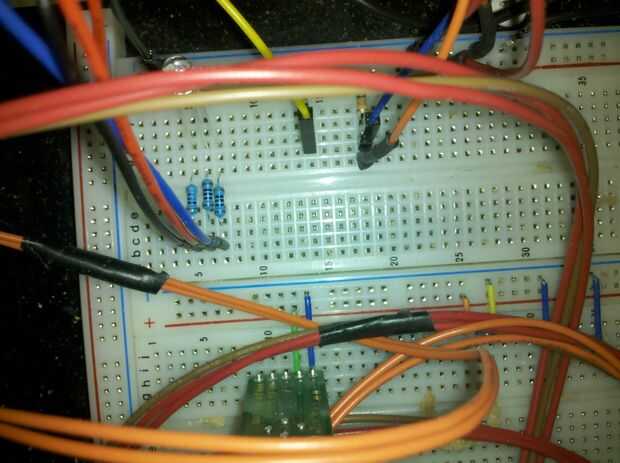
Por debajo es una imagen de la arduino cableado según las clavijas programamos.
Los cables azules conectados al MOSFET entran digitales pins 2 y 3 para el control de los motores; el LED está conectado a los pines digitales 4, 5 y 6; los botones están conectados a los pines 12 y 13. El potenciómetro se conecta a la clavija analógica 1.







 - previene el pie de pivote Slacking por los ladridos")




")
