Paso 4: Conexión de Motor
Impulsión diferencial:
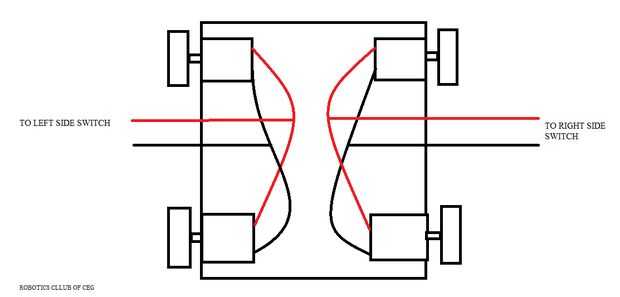
Aquí utilizaremos la unidad diferencial o impulsión de cuatro ruedas para controlar nuestro robot. En el que se conduce los cuatro motores al mismo tiempo para conseguir todos los cuatro controles básicos (adelantados, atrás, izquierdos y derecho). Wilh un caso especial de izquierda y derecha (arco de izquierda y derecha del arco). vamos a discutir esto en detalle más adelante. en cuanto a la conexión del motor, tenemos que acoplar los dos motores a cada lado del chasis. Para esto, considere los dos motores del lado izquierdo. alimentación con batería y averiguar los dos terminales a los que + y - terminales de la batería es tal que el motor gira (decir agujas) igualmente hacerlo por otro motor y tome nota de la conexión. conectar dos terminales para que + ve terminal de la batería fue conectada y dos otros terminales para que ve - terminal de la batería fue conectada y ahora tenemos sólo dos terminales en cada lado. al abastecimiento de la fuente utilizando la batería, motores de un lado giran en la misma dirección. Realizar la configuración similar para los otros dos motores del lado derecho del chasis. Haya terminado con la conexión del motor.
vamos a proceder con la conexión de switch!





 - controlado por iPhone, basado en arduino")

 también controlado por voz")





