Paso 1: Lista de piezas
Motores 2 x 3-wire (usé vex 393 motores con controladores de motor para hacerlos 3 hilos pero ninguno va a hacer.)
Servo de 1 x 3-wire (usado para subir y bajar la pluma, estoy usando una muy pequeña. El tamaño no importa, en este caso.)
1 x placa Arduino (usé un uno pero cualquiera debería funcionar)
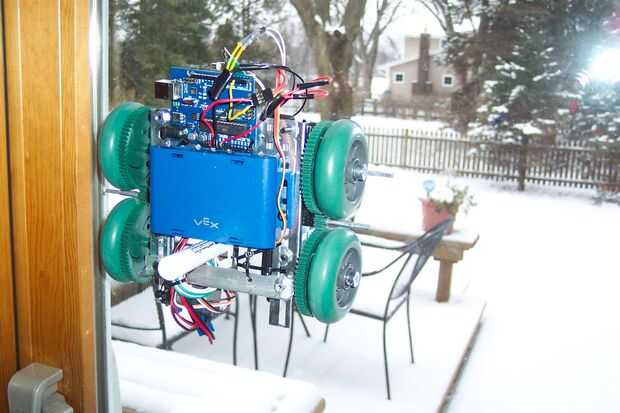
2 x imanes de neodimio (tengo la mía de magnet4less.com y pasó con N42 imanes circulares en aburrido 1" diam 1/2" de grosor. Estos son el verdadero quid de todo el proyecto como tienen que ser bastante fuerte para sostener el robot contra la pared. Mi robot pesa 2,5 libras y estos imanes mantienen conectado fácilmente a windows hasta 1" de espesor. Recuerde que siempre puede Agregar a espaciadores si son un poco fuertes).
1 x batería (estas son alimentar el arduino y conducir los motores, he usado el paquete vex 7.2v pero use lo que funcione para usted).
4 x ruedas (puede utilizar dos pero encontré cuatro para ser más precisos. Lo que son Asegúrese de que tienen un revestimiento de goma o alguna superficie de buen agarre.)
1 x pequeño protoboard (es opcional, usted puede simplemente alambre cosas directamente a arduino, pero ayudar a planificar los caminos hacia fuera).
1 x eje sencillo acelerómetro (opcional pero altamente recomendado) estoy usando uno que es realmente nada que hacer (se encuentran on-line para barato) veinte años de edad. Sólo recuerde para nuestra aplicación menor g valorar mejor, la mía es + 4g así hará cualquier cosa por ahí.
Materiales para el cuerpo (usar lo que tienes!!!!!! Quienes tienen una impresora 3d, intente hacer un chasis de esa manera. No tengo acceso a algo como eso pero el alumbrador, el mejor! He utilizado algunos chatarra).
Engranajes (usé unos vex, estos son necesarios para ruedas si haces un diseño de cuatro ruedas. Personas con impresoras 3d pueden hacer sus propio, pero para quienes no tienen acceso los engranajes lego son una posibilidad si los Montes se perforan hacia fuera. ¡ Sea creativo!)
Marcadores de la ventana!
Bits al azar del alambre tornillos para conectar todo.


 (utilizando un Arduino y un Netbook)")




")




