Paso 8: procesamiento
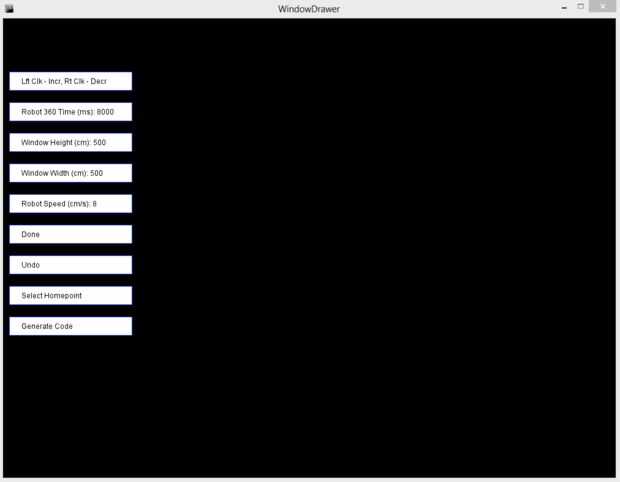
El programa sólo requiere 4 pedazos de información (5 si se utiliza un acelerómetro) antes de comenzar a dibujar: el tiempo que tarda tu robot para hacer un completo de 360 grados girar, la velocidad de tu robot (cm/s), la altura de la ventana y la anchura de la ventana. Si usando un acelerómetro la 360 gire no se necesita tiempo, pero más bien se especifican los valores máximo y mínimo para el acelerómetro. Estas son todas cruciales para tener un dibujo exacto. En el programa solo haga clic en los botones (como la ventana altura o robot velocidad) para cambiar los valores. Un todo aumenta los valores y un clic derecho disminuye a valores. Una vez que haya completado el click de configuración el botón "Done". Aparece una versión a pequeña escala de la ventana.
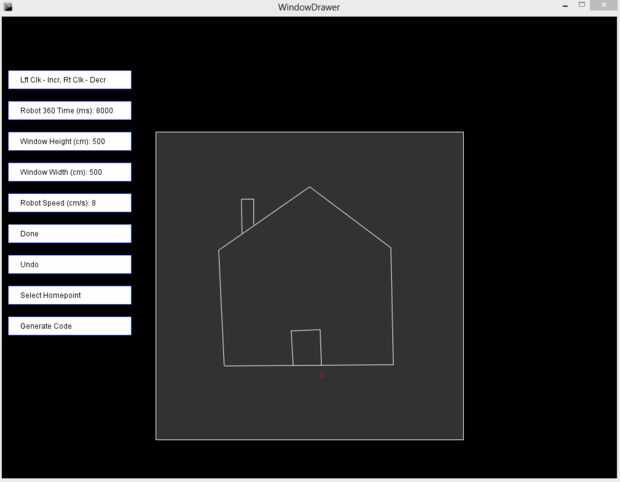
Antes dibujo Asegúrese de haga clic en el botón "Homepoint" y arrástrela hasta la ventana falsa. Donde te lo liberan que aparecerá un círculo rojo pequeño, este es el lugar que tu robot debe colocarse para comenzar el dibujo, y volverá a ese lugar al final del dibujo.
Ahora a empezar a dibujar simplemente haga clic y arrastre en la versión de la escala de la ventana. Cuando usted haga clic en el ratón será el punto de partida de la línea y donde suelte será el punto final de la línea. También hay un botón de "Deshacer" en caso de errores! Donde usted ve que una línea blanca es donde el robot bajará la pluma y sorteo, entre los líneas de ascensores la pluma y la mueve al principio de la siguiente dibujado línea.
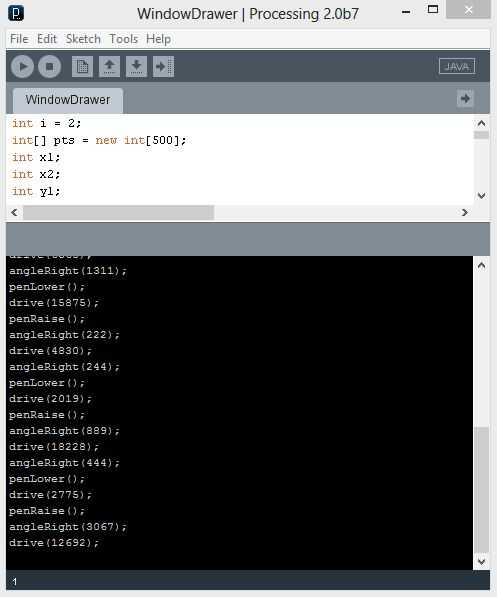
Una vez que haya completado el dibujo pincha el botón "Generar código". En la parte inferior del boceto original de procesamiento (el uno con el código en él), aparecerán un montón de comandos de arduino (debe decir cosas como angleLeft(); o drive();). Desplazarse hasta donde los comandos iniciar y utilizar ctrl - c / v a copiarlos todos. Este se utilizará con el arduino en el paso siguiente. (Si con el programa de acelerómetro el primer comando será calibrar (valores aquí); ya que esto da el robot de las lecturas del acelerómetro max y min.
Todos los sketchs de Arduino y el procesamiento puede ser descargan aquí


 (utilizando un Arduino y un Netbook)")




")




