Paso 1: Un Robot Rover con la pierna de un Robot cuadrúpedos.


2009 es el año que acaba de mudarse a Estados Unidos. Me tomó 3 años investigado, diseñado y guardado para comprar una plataforma rover básico de sitio web de Lynxmotion . Entonces comencé el experimento con diseño diferente para las ruedas y el mecanismo de los brazos.
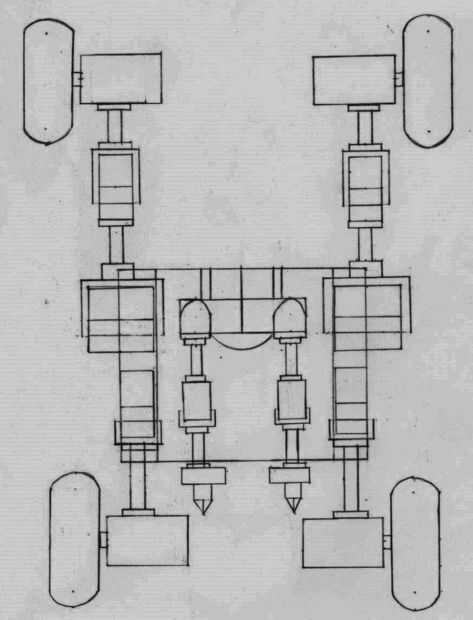
El primer diseño fue muy bien en papel, la idea estaba dando al vehículo la capacidad de un robot de cuadrúpedos. Vamos a hablar un poco robots cuadrúpedos caminando pasos exclusivamente la estabilidad del trípode. (Gracias al blog OscarLiang ).
El concepto de la estabilidad del trípode está allí serán siempre de tres patas en el suelo para hacer un triangulo con el centro de gravedad dentro del área del triángulo entonces el robot sería estables. El rover podría utilizar esto en su avance. En situación de obstáculo, cuando el rover rover puede utilizar la estabilidad del trípode a pie sobre el obstáculo o mover las ruedas a una ubicación más de avance (haga clic aquí ver rover en acción, lo siento por la calidad del video, ha sido un tiempo atrás :)).
Después de dos experiencias, me di cuenta entonces un gran problema. Los servos HS-645 no tiene suficiente par para soportar peso de rover durante un largo período de tiempo. El servo HS-645 consiguió evento más caliente cuando se aplica
o tratar de aplicar el concepto de estabilidad del trípode. Entonces tuve que raspar la idea de un rover con capacidad pata cuadrúpedos (hasta 2 años más tarde cuando descubrí servos engranajes caja tecnología de sitio web de Servocity, entonces sabía que esta idea sería posible si tengo el fondo para invertir en la caja del servo).
Debido a la limitada financiación, tuve que avanzar hacia el diseño de los brazos de rover.









 con Video Stream en vivo!!")

 Stage1Model2")
")
