Paso 5: Tiempo para probar el auténtico!
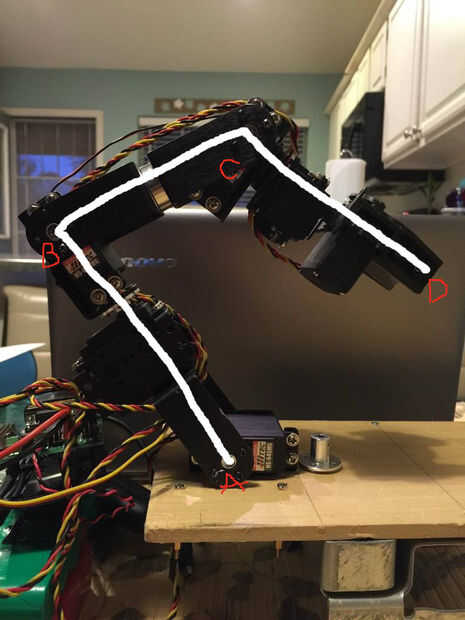


La configuración del brazo lo mismo que el diagrama con un, B, C, D representa el punto de conexión donde la variable dependiente ángulo forma.
Utilizando las propiedades básicas de la trigonometría; inverso; Yo era capaz de predecir que la coordenada del punto D sería si tengo control sobre el ángulo dependiente en este caso que yo soy. En teoría, si sé la coordenada del punto D entonces puedo resolver para el ángulo requieren entre cada articulación. Y probó en el papel.
La razón de la función matemática es cada vez alimenta la función de punto d x e y coordenadas, la función debe devolver el ángulo correcto para cada articulación lograr la tarea. Y entonces cuando me doy cuenta de eso por eso la llamada de función matemática cinemática inversa. > "<









 con Video Stream en vivo!!")

 Stage1Model2")
")
