Paso 5: Control de la robusteza de la rueda de mecanum
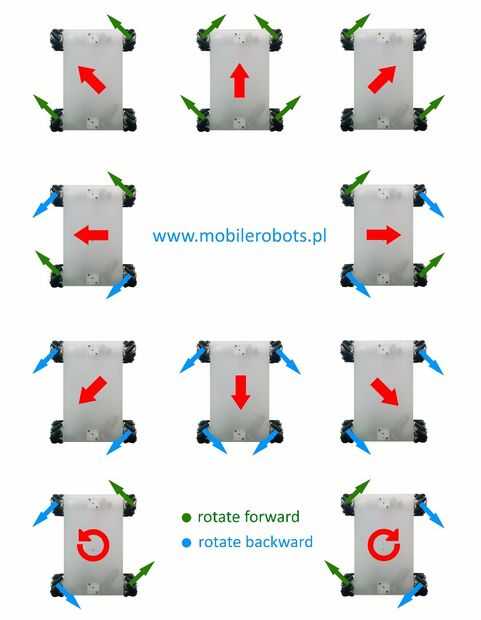
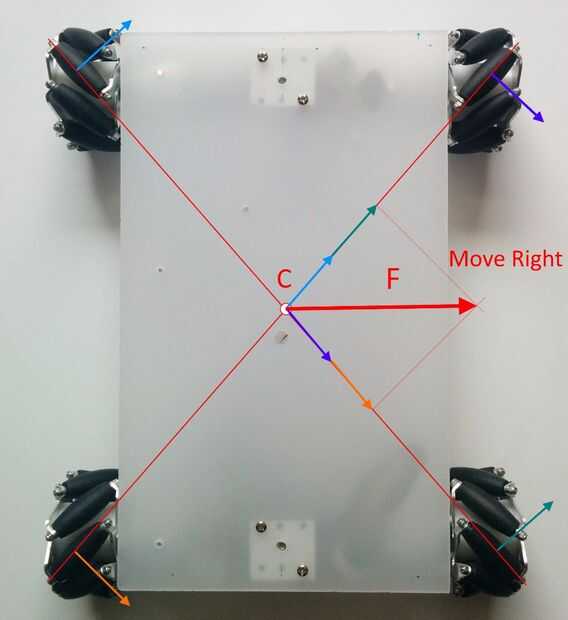
Cada rueda de mecanum tiene rodillos libres, que hacen un ángulo de 45 grados con el eje de la rueda. Este diseño de rueda permite robot para moverse en cualquier dirección como se muestra en figura. Las flechas azules y verdes indican que la dirección de la fricción de las fuerzas actuando sobre cada rueda de mecanum. Moviendo las cuatro ruedas en la misma dirección podemos conseguir movimiento hacia delante o hacia atrás. Controlar las dos ruedas en una diagonal en la misma dirección y otras dos ruedas en la dirección opuesta tenemos movimiento hacia los lados como se muestra en la figura segunda (movimiento correcto).
Usted puede descargar mi aplicación Android que permite controlar el robot de rueda de mecanum desde Google Play: enlace
Cómo utilizar la aplicación para Android:
- Pulse el botón menu o 3 puntos verticales (dependiendo de la versión de tu Android)
- Seleccione la pestaña "Conectar un dispositivo"
- Puntee en la ficha "HC-06" y después de un tiempo usted debería ver el mensaje "conectado a HC-06"
- después de conectar, puede controlar su robot
- Si no ve el dispositivo bluetooth HC-06 Pulse el botón "Buscar dispositivos"
- en el primer uso emparejar dispositivos bluetooth, ingresando el código por defecto "1234"
Si quieres ver mis otros proyectos relacionados con robótica por favor visite:
- Facebook: robots móviles
 con Video Stream en vivo!!")











 también controlado por voz")
