Paso 6: Las conexiones y las fuentes de energía
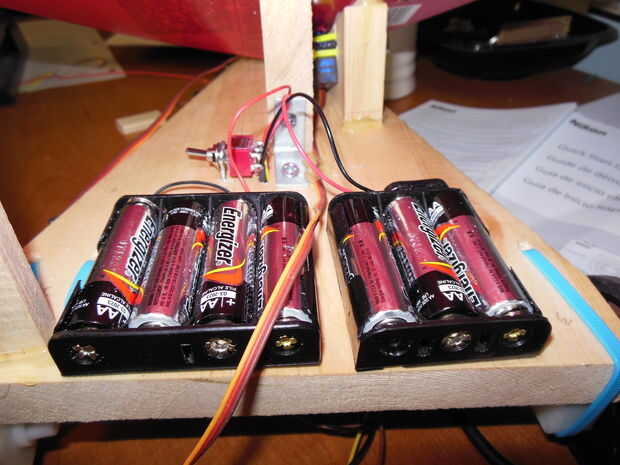
Utiliza dos fuentes de alimentación. las potencias de 4,5 voltios el Picaxe y los 6,0 voltios alimenta los motores (2 servos y 2 ruedas). Este hecho conectando el los cables rojo y negro del soporte de la batería a las entradas apropiadas en la placa Picaxe. La documentación de Picaxe dice que la resistencia debe cortarse si usando fuentes de energía independientes (ver foto).
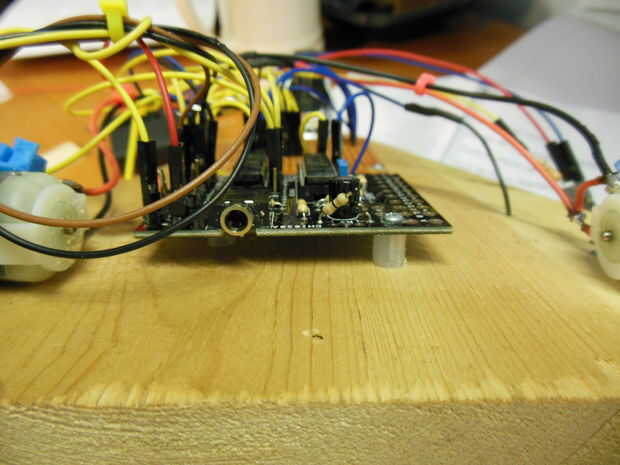
Para cada motor/servo hay un cable de corriente y tierra. S cada par está conectado a la Junta a los pines de salida que se utilizan en el código. Los cables de control aún necesitan ser conectados a los pines del Picaxe.
El sitio de Picaxe tiene pdf para los manuales. Manual número 3 tiene una buena descripción de cómo conectar servos y controladores de motor.
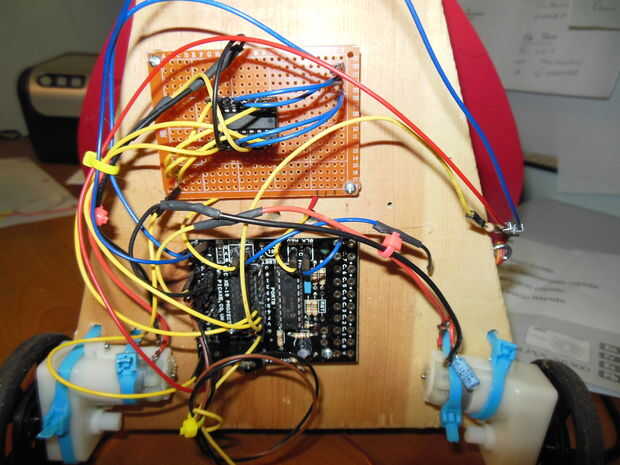
Yo soy sólo control en de los motores a través de la SN75441 como yo puedo controlar el robot bastante bien así.
El chip controlador del motor permite control de velocidad y comando de atrás hacia adelante. Así que puedo hacerlo con un motor. el otro es justo o apagado. Esto funciona para mí como el robot solo hace giros de la mano izquierda. Mucho más control se tenía si controla ambos motores a través de la SN75441.




")





")


