Paso 2: Integración de Hardware
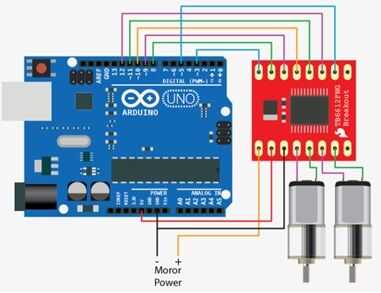

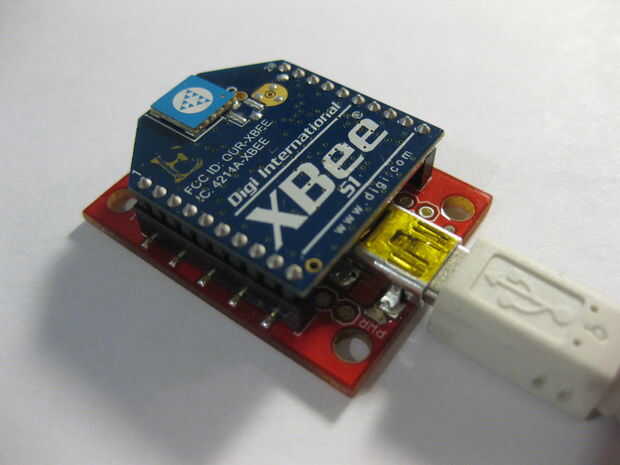
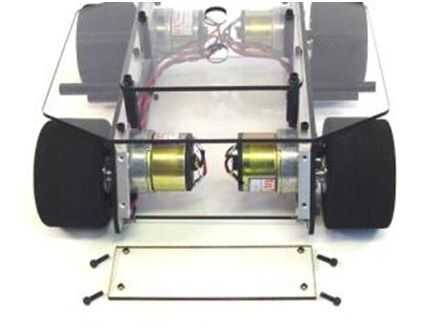
Esto es realmente simple, sólo tienes que ensamble el robot de sumo terminator kit (en este caso), hacer el motor controladores conexiones, poner la placa de expasion de E/S en el arduino con uno de los módulos XBee, conecte el adaptador de xbee usb al ordenador, por supuesto con el un módulo XBee.
Para la alimentación, yo solía usar dos baterías, uno para los conductores del motor y otro para el arduino.
![[Rokit Smart] Robot de sumo](https://foto.askix.com/thumb/170x110/4/d7/4d7c9ab4c1ee59b03b3bcab96c8e72a7.jpg "[Rokit Smart] Robot de sumo")

")

")



")




")