Paso 4: Conectar el Arduino
Usted debe han visto los cables puente lío ya...
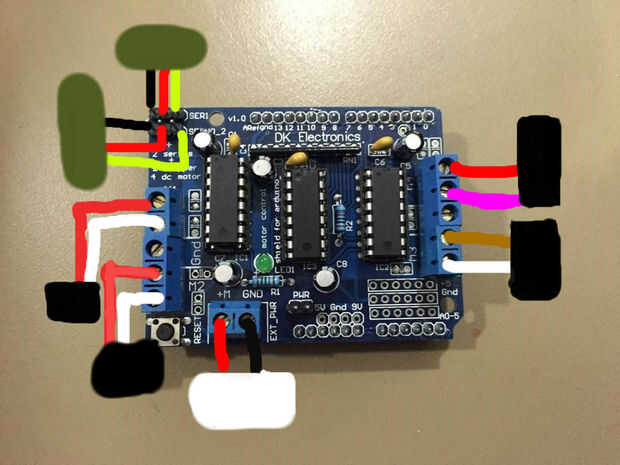
Pero realmente los esquemas no son tan asustadizos como piensas. Básicamente los dos servos conectados a los dos puertos para servos, y los motores de DC de alto par derecho e izquierdos se conectan al puerto de M1 y M2 respectivamente. La bomba de aire está conectada a M4, mientras que el motor para la muñeca del brazo robótico está conectado al M3.
Un verde LED está conectado al pin 2 de Arduino (según el escudo manual ese pin no está implicado en el control de los motores) y el conector de tierra.
El conmutador está conectado entre el extremo negativo de la fuente de alimentación y el extremo de tierra del protector. El extremo positivo de la batería se conectará al extremo positivo del escudo.
Y eso básicamente es todo...



 - controlado por iPhone, basado en arduino")





 también controlado por voz")



