Paso 2: El escudo para el robot de telepresencia
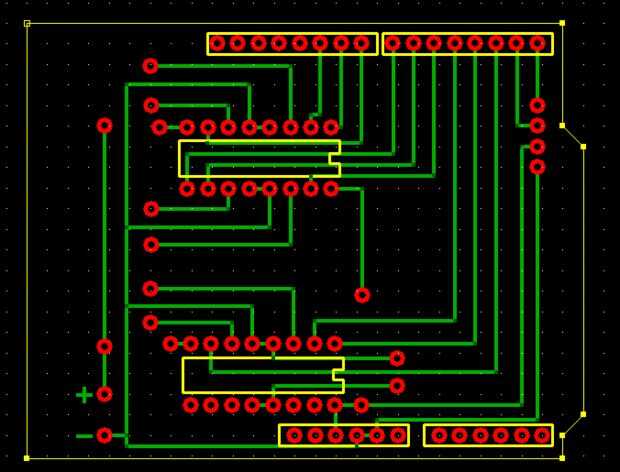
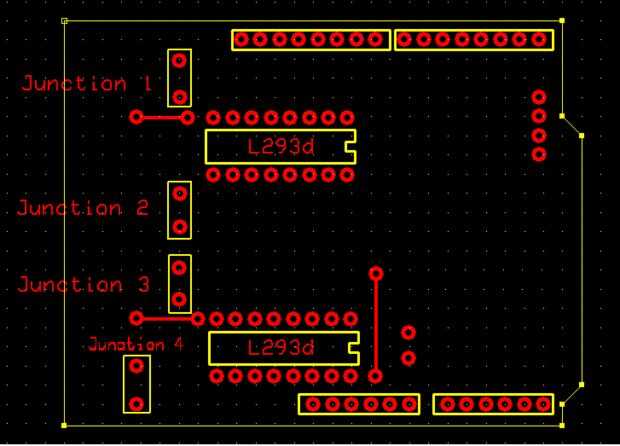

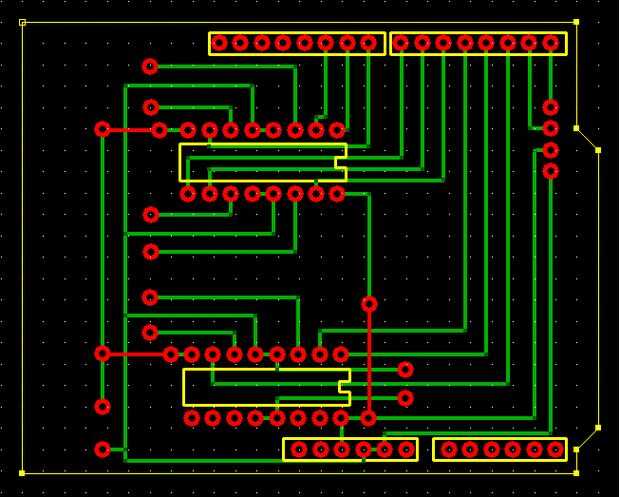
Con el fin de lo que es fácil de ensamblar el robot, he hecho un escudo ardunio que puede apilarse sobre el tablero de Edison. La naturaleza capaz de pila hace fácil de usar e implementar. Fig-1. es circuito plantilla del escudo. El escudo tiene dos l293d driver IC y 3 uniones motor para conectar los motores. Controlador L293d es un doble motor driver puente H circuito integrado (IC). En este escudo utilizaremos 3 de los puentes de H (2 para control del motor) + 1 para uso futuro. En la fig.2 a ver junction(1,2,3) que son las conexiones de los motores.
Las conexiones del controlador l293d con el escudo de ardunio son los siguientes:
Salida 1:
habilitar pin: pasador 9
entrada 1: pin 10
entrada 2: pin 8
Cruce 2:
habilitar pin: pin 7
entrada 1: pin 5
entrada 2: pin 6
Cruce 3:
habilitar pin: pin 3
entrada 1: pin 2
entrada 2: perno 4
Junto con esto encontrarás eso Perno 0,1 se utilizan para conectar el timbre arboleda al escudo. La pantalla requiere una fuente de alimentación propia, que se conecta a salida 4 como se muestra en la figura 2.
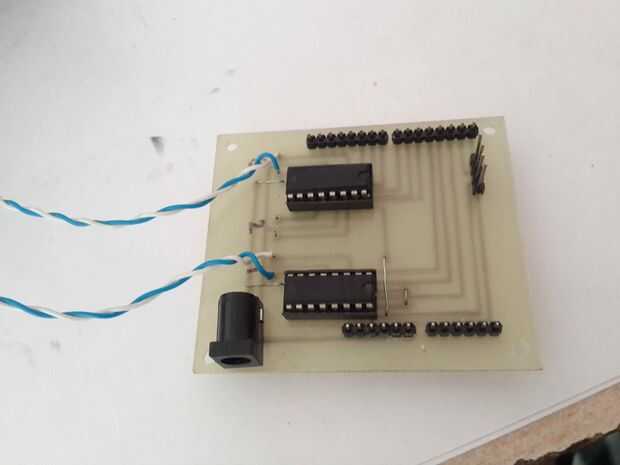
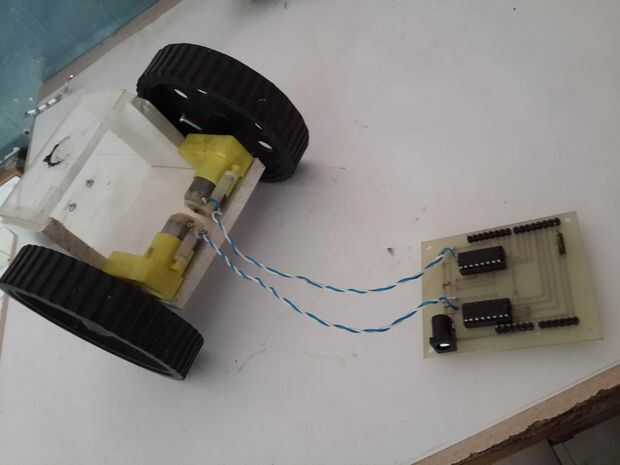
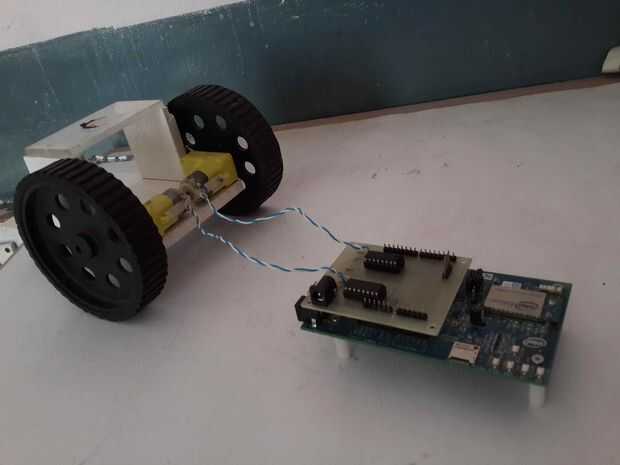
He conectado la pantalla superior, inferior y seda diseño de más abajo. Obtener una impresión de los diseños anteriores, conseguir el PCB impreso y tiene un escudo para telepresencia robot.fig 3. muestra la pantalla después de fabricarlo. Ahora puede seguir adelante y conectar motores al cruce 1 y 3. como se muestra en la figura 4. Finalmente Coloque el escudo en el tablero de Edison, que ya sea directamente o a través del escudo de expansión suministrada con el kit de surco. La Fig 5 muestra la configuración final.

")

")





")
)")


