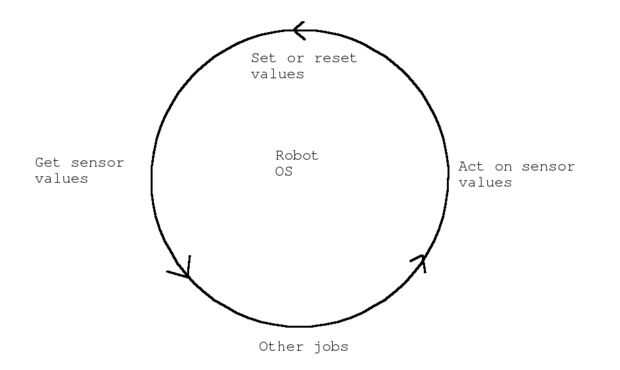
Sistema operativo del robot. El bucle infinito.
Mientras que el verdadero %
' establecer o restablecer valores
' valores de los sensores de entrada
' Otros trabajos
' Hacer lo que es necesario basado en los valores de entrada.
WEND
Parte I. establecer o restablecer valores.
Parte II obtener valores del sensor.
Leyendo las clavijas de entrada
El comando para leer de los puertos en qbasic es INP. La dirección que necesita leer es la dirección del puerto paralelo (generalmente 378h) + 1; por lo que la dirección generalmente es 379h. Como mencioné antes, los pines utilizados para la entrada son 10-13 y 15. Leyendo las clavijas diferentes es poco más difícil de escribir en los puertos, ya que tiene que cubrir los pasadores no interesa. Al leer el puerto, los primeros 3 bits devueltos no se utilizan. Por ejemplo, el código de qbasic a continuación leyó el pin 12 (de papel). Cuando este puerto es alto, "sobre papel / perno 12 activada" se mostrará:
data = inp(&h379) IF (data and 32) = 32 then print "Out of paper / pin 12 high"
La siguiente tabla lista el número de entrada de pin pin, su propósito normal y el número necesario para leerlo (por ejemplo, 32 fue utilizado en el ejemplo anterior):
| Número de PIN | Objetivo normal | Número leer |
| 10 | Ackowledge | 64 |
| 11 | Alta cuando no ocupado | 128 |
| 12 | Alta cuando fuera de papel | 32 |
| 13 | Cuando alta impresora en línea | 16 |
| 15 | Alta cuando no hay error | 8 |
Si entiende binario, usted debe ver inmediatamente dónde vienen estos números, y por qué se utilizan a la máscara a todos los otros pines que no estamos tratando de leer. La cosa más simple que se puede utilizar para probar esto es sólo tiene que conectar un interruptor entre un pin de entrada y un pin de tierra (18-25). Por ejemplo, si se conecta un interruptor entre 15 y 20, puede utilizar el código siguiente para controlar cuando se presiona el interruptor:
start: res = INP(&H379) CLS IF (res AND 8) = 8 THEN PRINT "Button pushed" ELSE PRINT "Button NOT pushed" FOR delay = 1 TO 500: NEXT delay GOTO start
Sé que este código es un poco desordenado y oscilará, pero está escrito para mayor claridad. El mismo código puede utilizarse para controlar las otras cuatro líneas de entrada cambiando a '8' a otro número de la tabla.
Parte III otros trabajos.
Parte IV
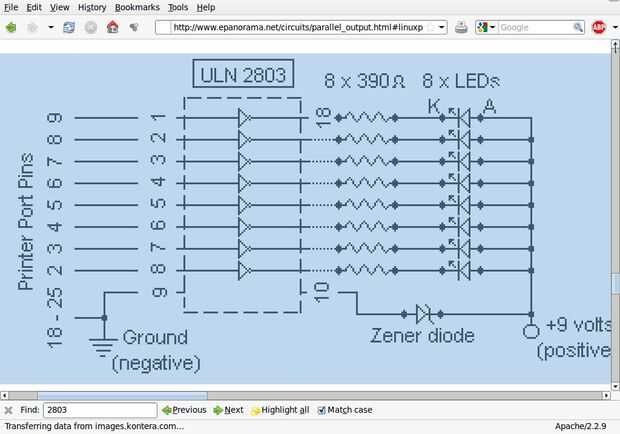
Podemos utilizar programas como parcon a establecer los valores en el puerto paralelo para tal jpbs como controlar el tren de potencia. Vea también:




.")








