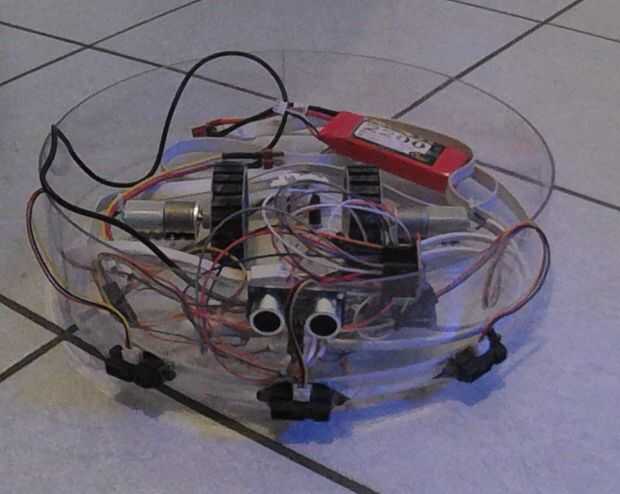
Il robot DIY grazie ai suoi 3 sensori ad infrarosso e un radar ad ultrasuoni è en grado di muoversi liberamente evitando gli ostacoli si trova perderse. Riconosce autonomamente se l'ostacolo è di fronte a destra o a sinistra e di conseguenza reagisce invertendo il senso di rotazione dei motori ed effettua rotación en senso orario e anti orario a seconda della posizione dell'ostacolo, de este modo trova sempre la via più libera.
La precisione color de di tutti e 4 i sensori è stata implementata grazie haber del Filtro di Kalman nel codice sorgente asociativo ordina IA sensori di effettuare 50 misurazioni al secondo restituendo ONU unico valore è la medios de comunicación dei 50 valori misurati, grazie a este filtro tanto quanto semplice efficace il robot si ferma sempre alla distanza desiderata con errori molto piccoli , no visibili un umano occhio.
L'idea è quella di realizzare un robot automono en grado di colpire no mai alcun ostacolo nella sua rotta e magari con adición di ONU panno una carica elettrostatica por pulire i pavimenti potrebbe essere no solo bello da vedere ma anche nelle utile pulizie domestiche.


")








