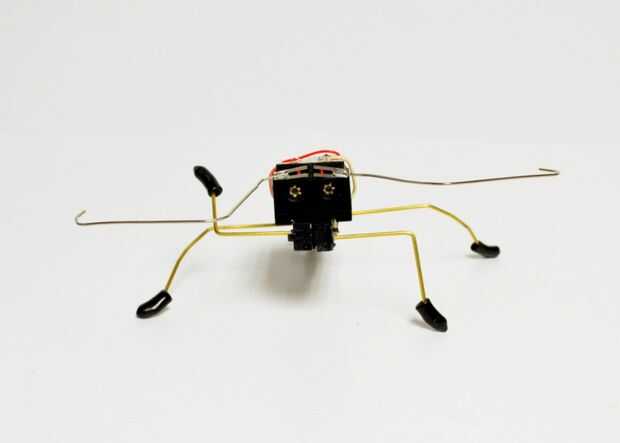


Este es un pequeño robot que hice después de que algunos motores de micro gusano. No tengo ni idea de lo que los motores son realmente supone ser utilizado para, pero son ideales para pequeños robots. El escarabajo puede desplazarse a cierta velocidad y también puede evitar obstáculos con sus calibradores de espesor. He probado lo sobre superficies planas, pedregosas e inclinadas y él realiza brillantemente.
Si el clip no funciona - pruebe este uno
Esta es mi primera versión y estoy seguro que va mejorando el diseño en mis próximos esfuerzos. En general aunque me gusta la forma de este chico poco se mueve. Tiene un tipo de andar desgarbado, saltando y se mueve con cierta velocidad. También he añadido un par de "calibradores de espesor" por lo que cuando se encuentra con algo, sólo una parte se mueve y se vuelve.
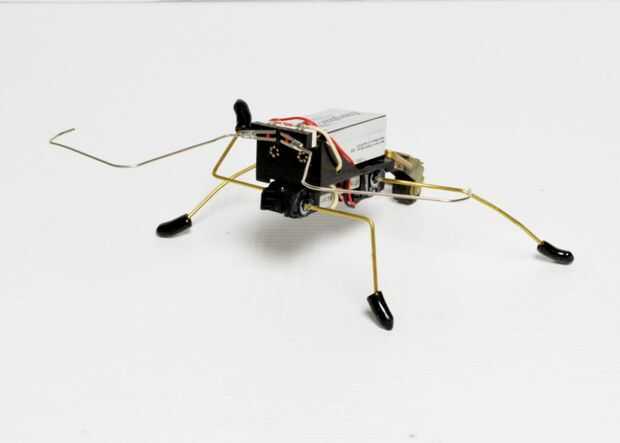
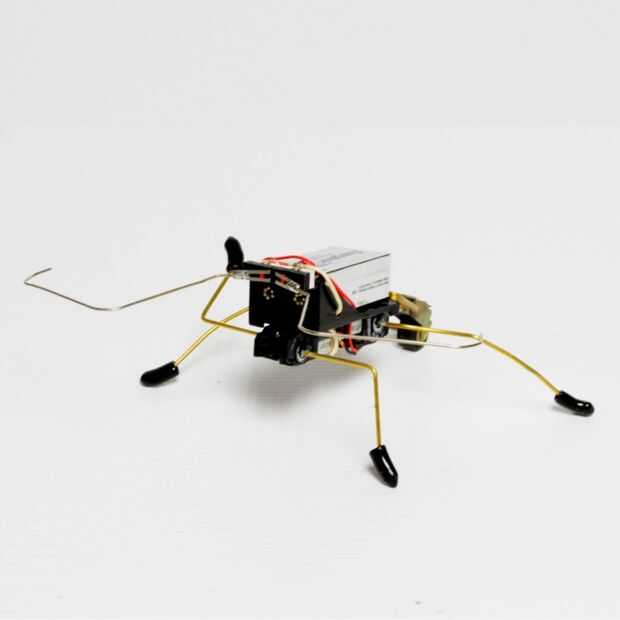
También yo he estado experimentando mucho con la forma de sus piernas. Quería aprovechar al máximo los movimientos sin las piernas golpeando unos a otros. Después de un pequeño golpe y miss que subió con un paso bastante bien. Él fuera, he probado a través de las superficies ásperas y trabaja igual de bien! Realmente me sorprendió lo bien logró superar a piedras y palos que estaban en su camino.
Probablemente se puede ver en las fotos que también tenía que poner una rueda en la parte posterior para que no voltee. Esto fue una ocurrencia tardía aunque no creo que necesitaría.
¡ Mira el video a continuación para ver el escarabajo en acción.

")









")

")