Paso 3: creación de prototipos

Recomendamos comprobar el esbozo de la robusteza y todos los componentes de hardware antes de empezar a montar.
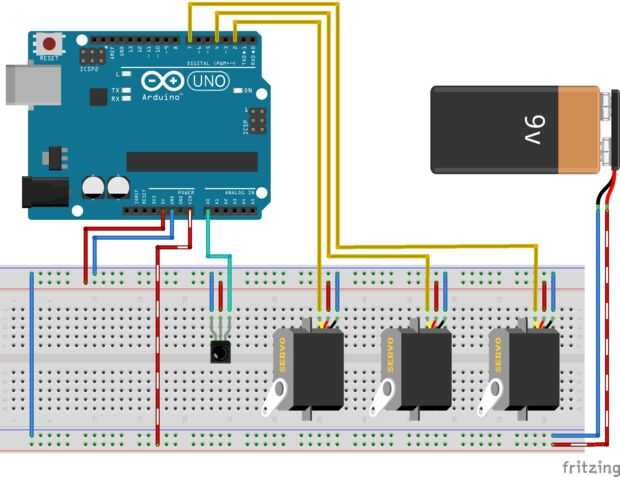
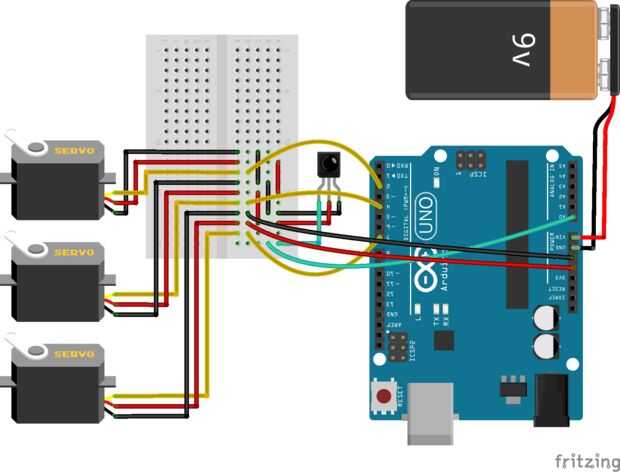
Echa un vistazo a las fotos. He adjuntado dos circuitos. Son iguales pero una es grande y clara y el otro es pequeño y terrible. Tenemos que hacer el terrible. Se puede ver que usé sólo una pequeña área de protoboard – pernos 5 x 10. Es el tamaño de la protoboard que lo montamos en el robot este último.
Abrir dibujo /ir_ringo/ir_ringo.ino en el IDE de Arduino. Tenemos todo el código fuente en el paso anterior. Ves que hay dos pestañas en la ventana del editor de: "ir_ringo" y "ir_command_codes.h". Dividí el bosquejo en dos partes: los códigos de fuentes comunes y personal IR constantes. Antes de empezar a subir el boceto cambiar mis códigos de IR a la tuya. Que has guardado en una tabla en el paso anterior. Como he dicho antes cada comando puede asignarse a varios códigos únicos. Puede utilizar esta característica para utilizar más de uno IR remote para controlar el robot.
Después de que han cambiado los códigos pueden subir el boceto al controlador. Cuando comienza el bosquejo servos todos hacia la posición de 90°.
Ahora vamos a probar nuestro prototipo. Presione el botón "adelante" en el IR remote. Verás que los 3 servos han comenzado oscilante proceso alrededor de la posición de 90 °. Presione los botones de colores y comprobar ese período de cambios en el proceso de oscilación. Velocidad lenta y presione "hacia atrás". Usted verá que servo central cambió su fase.
No olvide revisar la batería y encendido/apagado en el portabaterías. Desenchufe el cable USB del Arduino Uno y conectarse para pilas. Asegúrese de que cable rojo (positivo) es en pin "Vin" y el otro cable (negativo) en pin "GND" del controlador. Encienda el interruptor en el soporte de la batería y realizar nuestra prueba anterior.





")







