Paso 2: Preparar los motores y las conexiones.


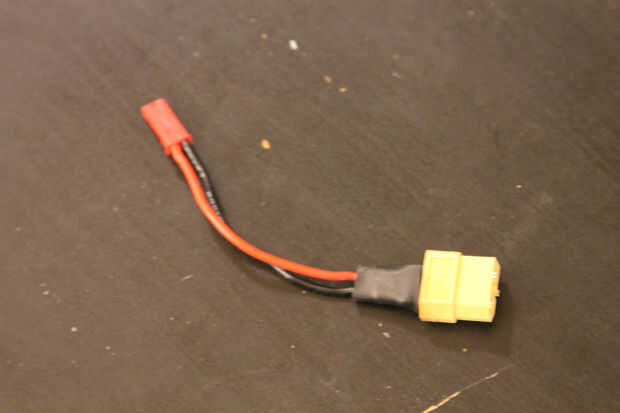
Antes de montar los motores, soldada a un soporte de motor que me permite conectarse fácilmente a un macho JST 20. Me parece útil para usar motores en otros proyectos más adelante y haciendo mucho más fácil mantenimiento y modificaciones de robot. Se conecto mi motor al ESC (control electrónico de velocidad) más adelante usando un conector XT60 (muchos otros conectores funcionaría bien), por lo que había soldado el conector JST macho a un conector XT60 macho.
Preste atención a positivo y negativo! Los motores de Actobotics tienen un punto blanco en el terminal positivo pero se pueden también conectar el camino inverso. Para este robot, hacer positivo y negativo de la misma para cada motor.
Puede soldar los cables directamente al motor y ESC, pero conectores realmente hacen todo más fácil para el futuro.
2 x - (JST20M) 20 awg conector JST macho
2 x - (605120) motorreductor Junta D (para motorreductores planetarios de 32mm)
2 x - conectores XT60 macho






 Chasis de plataforma-un Robot robótica Arduino DIY de piezas de repuesto")



