Paso 6: instalación y cableado


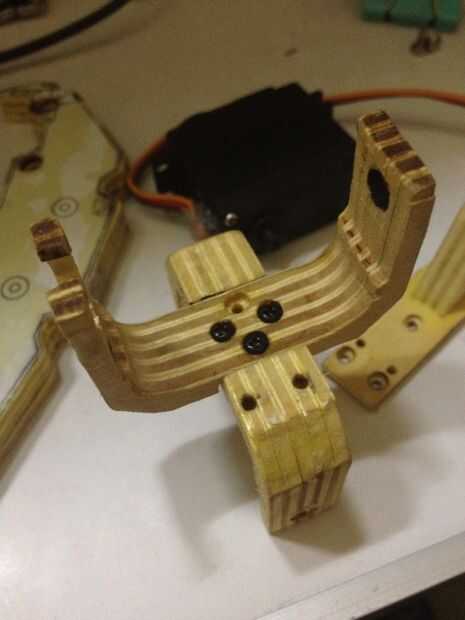






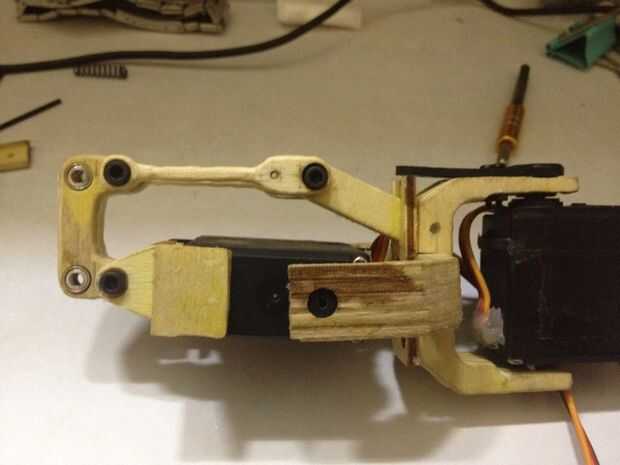











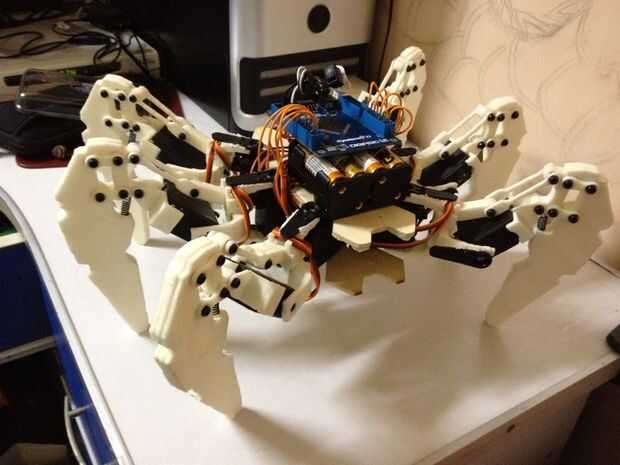
Para mayor comodidad, tomé el prototipo aquí como ejemplo. Tomé fotos de cada los pasos. Instalar todos los componentes de cada piernas paso a paso. Luego fijarlas en el chasis.
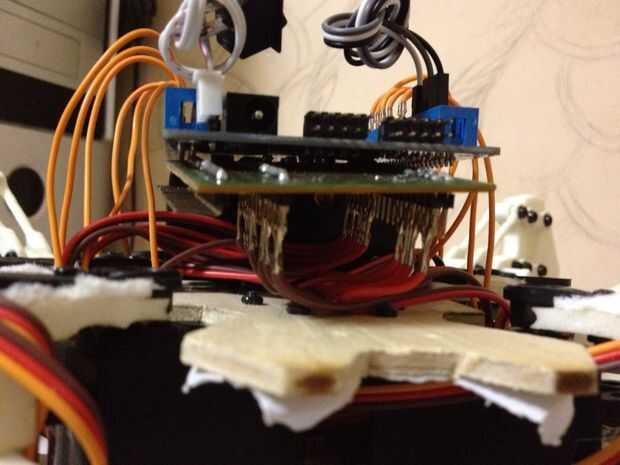
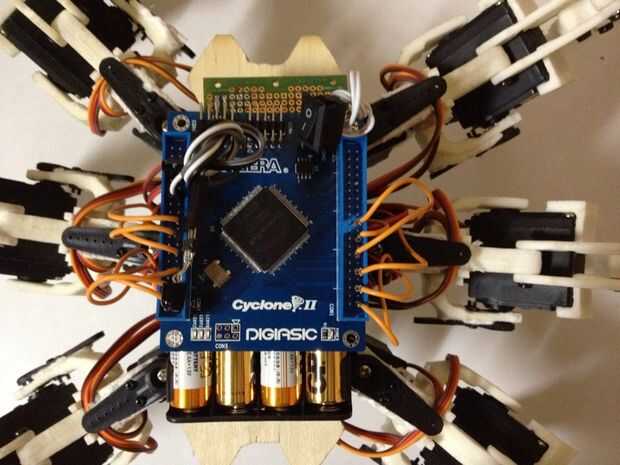
Tenemos en conjunto 12 motores y 36 líneas aquí. Las líneas alrededor de los caballetes y a través de la parte inferior de la curva. Líneas de alimentación y tierra se pegan en las clavijas del tablero de la fuente de energía. Líneas de señal del palillo en los puertos GPIO del tablero de viruta GPGA que se pueden asignar en QuartusII software. Entonces puso en la batería con baterías de 1,5 8 v, cuatro de ellas conectan en serie y dos grupos de cuatro se conectan en paralelo. Que viene la fuente de alimentación de 6V del robot. Través de LDOs en el tablero de la viruta, la fuente de 5v se transforma en 3.3v, 2.5v o 1.2v que la viruta necesita.
En la parte superior del robot se encuentra un sensor de infrarrojos. En esta primera generación, temporalmente usar un sensor IR que recibe una señal de IR de un control remoto que sigue el IR remote el protocolo general, como protocolo NEC.



")


")

")


. ¿")

")