Paso 1: Construir la base



La base del robot consiste en 6 muy fuerte y paneles lexan durable con un tri kit de banda de rodamiento de tanque que envuelve alrededor de 6 piñones en cada lado de la pista. Los piñones se entrelazan con los peldaños como una cadena de la sincronización encerrarlos, por lo que no hay deslizarse. Las pistas de replican el diseño real y funcionan muy bien incluso con velocidades más altas. Aquí está una guía paso a paso sobre cómo construir la base. Después de montar la base puede organizar su electrónica y hacer un plan sobre qué poner en la base. Puede perforar agujeros muy fáciles de montar las piezas extras si es necesario. Esta base es totalmente personalizable y puede manejar una buena cantidad de peso. Paso 1.
Coloque cuatro barras de aluminio de 3" en el interior par de paneles lexan como se muestra. Utilizar 4-40 x. 375" tornillos hexagonales.
Paso 2.
Colocar separadores hexagonales de 1.5" a los paneles lexan como se muestra. Utilizar 4-40 x. 375" tornillos.
Paso 3.
Conectar los motores, con cuatro de 3 x 8mm tornillos. Asegúrese de que los ejes del motor y los separadores hexagonales están del mismo lado de los paneles lexan.
Paso 4.
Instalar los cubos sobre los ejes de motor. Alinee el eje para quedar al ras con el extremo del eje del motor. Apriete el tornillo firmemente.
Paso 5.
Instale los piñones en los ejes. Tómese su tiempo para asegurarse de que la línea de los dientes de los piñones! Usar dos 4-40 x. 625" tornillos por cada lado.
Paso 6.
Preparar la rueda dentada intermedia. Instalar las mitades de la rueda dos dentada espalda con espalda en el extremo largo del eje intermedio. Tenga cuidado de hacer los dientes en la línea de piñones para arriba! Sujete con tornillos dos de 3 x 8mm. Hacer cuatro conjuntos de rueda dentada intermedia.
Paso 7.
Instale los rodamientos de bolas a la rueda dentada intermedia, dependiendo que versión intermedio del centro de la. Instale la rueda dentada intermedia en el panel lateral. Deslice doce casquillos de nylon sobre los separadores de nylon.
Paso 8.
Instale los paneles lexan externo para cerrar hasta las Asambleas. Utilizar doce 4-40 x. 375" tornillos.
Paso 9.
Envuelva la Asamblea 21-segmento pista alrededor de las ruedas dentadas, empuje el eje en y seguro con dos nylon remache broches. Estas piezas se incluyen con el kit de la pista, no el kit de chasis.
Paso 10.
Tomar un pequeño descanso.
Paso 11.
Coloque separadores hexagonales de 1.5" en el panel inferior como se muestra. Utilizar 4-40 x. 375" tornillos.
Paso 12.
Fije el panel superior. Utilizar seis 4-40 x. 375" tornillos.
Paso 15.
Fije los conjuntos de pista en el chasis. Use ocho 4-40 x. 375" tornillos.
Puede instalar la base gire usando los tornillos de arriba de los separadores.
Paso 17.
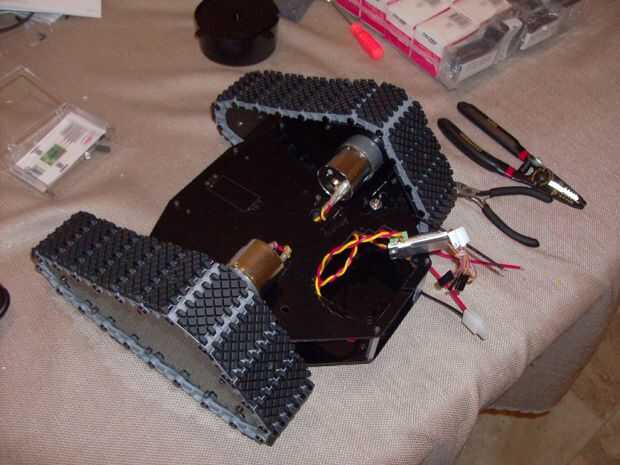
Empuje las patas del condensador a través de los agujeros en los bornes del motor. Doblar las patas del condensador abajo en los terminales.
Paso 18.
Acople los conectores de cable del motor a los bornes del motor. Asegúrese de poner los cables rojo (+) y (-) los cables amarillo.





")







