Paso 2: Montaje y soldadura

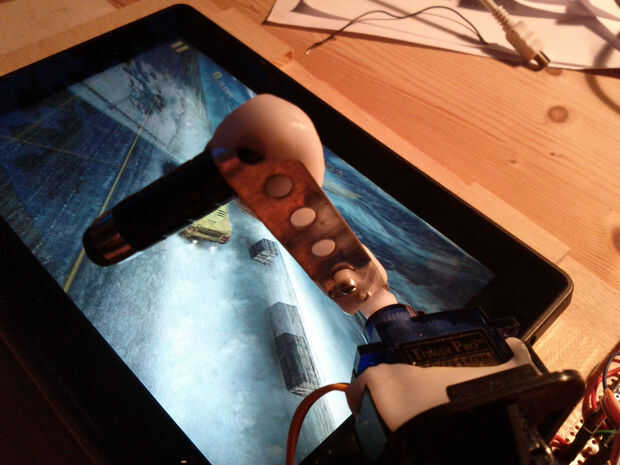
Los servos tienen que construir un brazo que puede moverse verticalmente y horizontalmente. Ordené un montaje de cámara de China de ~ 3 euros hace unos meses encontré en mi pila y por lo tanto utilizó esto para este proyecto. Básicamente se pueden montar fácilmente dos servos sin el soporte de cámara anterior. Si deseas instructables para algunas ideas. Utilicé un trozo de 5 cm de chapa de acero perforada para alargar el servo brazo y polimorfo formable plástico (búsqueda de instructables para polimorfo si no sabes todavía Polimorfia!) para pegar la aguja en el brazo. Además solía polimorfo para montar el tercer servo a la cámara sosteniendo cosita en vez de una cámara.
Los servos tienen que conectarse a VCC y GND y las líneas de señal al pin 10, 11 y 12 en el ARDUINO. Recomiendo usar una fuente externa para los servos. Si lo hace, asegúrese de conectar los argumentos de ambos circuitos (tierra común).
Antes de atornillar el brazo al madera en blanco he hecho algunas pruebas con el software para ajuste fino de la posición correcta de la sincronización y el brazo.













